astrosatch And for multistar guiding option, why those with lower end mounts won't improve their guiding?
Using multiple stars essentially reduces the centroid measuring error.
Atmospheric turbulence ("seeing") jitters the star's position as seen by your guide camera. When you use longer exposure times, you are averaging the centroid value, and if the turbulence causes symmetrical errors (things like upper atmospheric winds could cause a bias, though) then the star image is more bloated, but the centroid is more accurate. When you double the exposure time, the variance of this error should decrease by a factor of two (the RMS error decrease by a factor 1.4). If you quadruple the exposure time, the centroid estimation error should reduce by a factor of 4 and the RMS reduces by 2, etc, etc.
The problem with increasing exposure time is that the control loop becomes less effective (and can become oscillatory). And that is why you have to keep the aggressiveness low. If seeing is not a problem, you should use as short an exposure time as you have processing power (sampling theory holds for digital control systems).
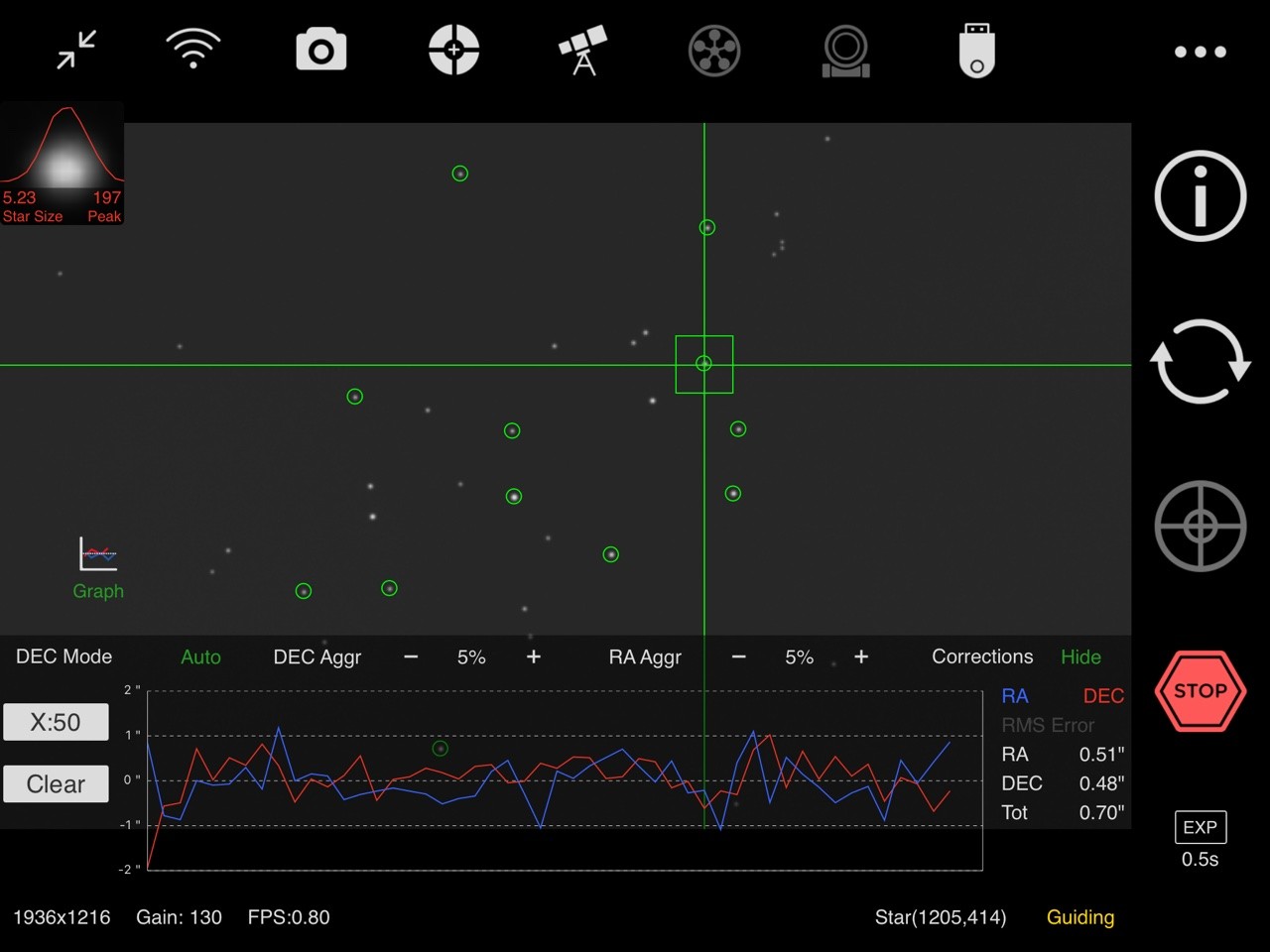
What multiple star centroid computation does is to use more stars instead of more exposure time.
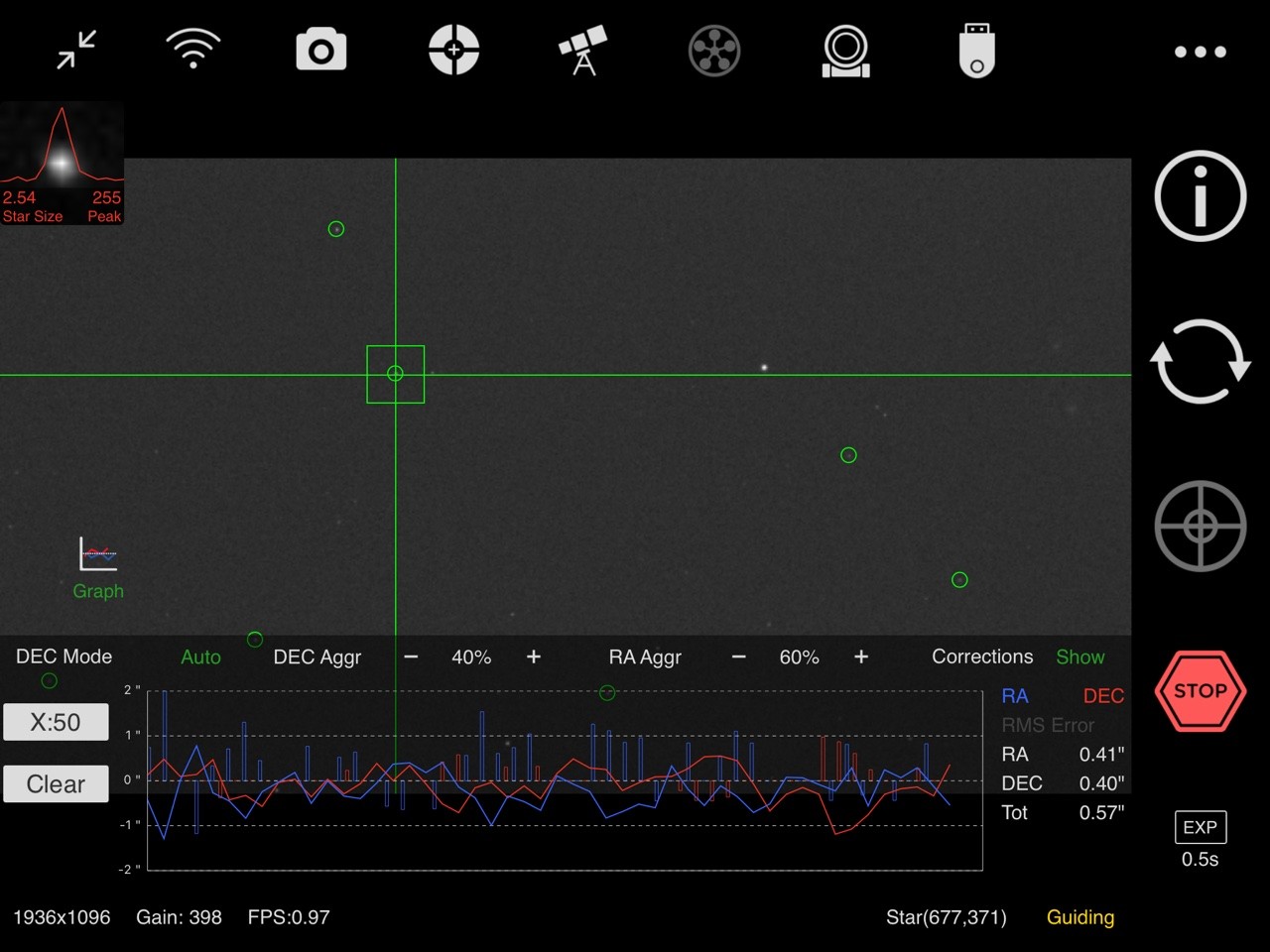
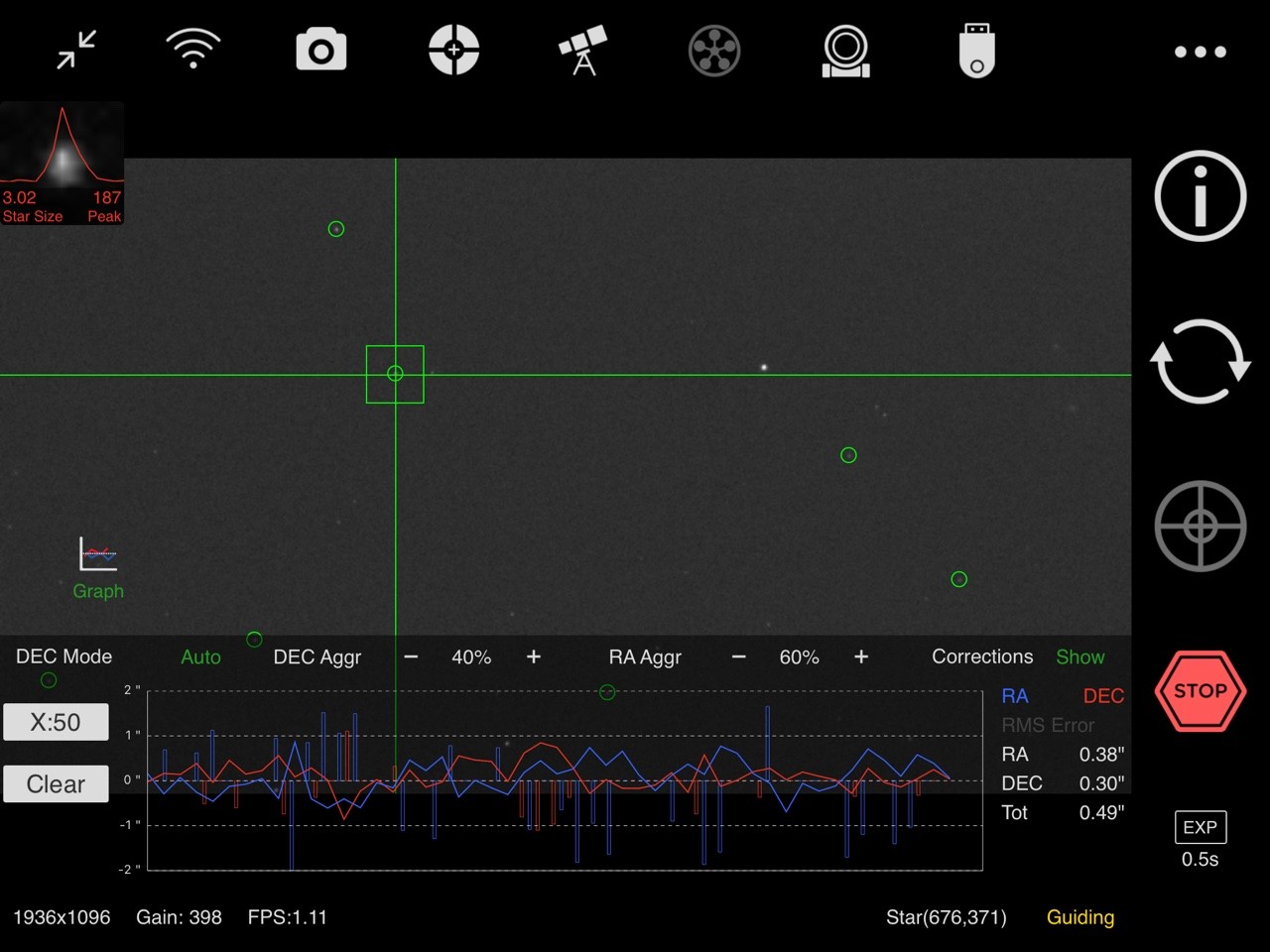
The atmospheric turbulence that affects one star is hundreds and thousand of kilometers from one another, so have no relationship (in Probability Theory, this is called " statistically independent", and all sorts of theorems apply). And according to Probability theory, if the statistics is Ergodic, averaging with multiple stars is the same as averaging a single star over a longer period. I.e., with two stars, the variance of the error should reduce by 2 (RMS by 1.4), with 4 stars, the variance should drop by 4 (RMS by 2), etc.
So, what multiple stars does is to reduce the measurement error of the centroid, without having to increase the exposure time, (as mentioned above, longer exposure time is a bad thing). No more, no less.
If you have a mount that has bad gears, insufficient motor torque, bad backlash, bad third axis balance, and if those errors are larger than the centroid error in the past, then multiple stars will not help (or help only partially).
Measuring the centroid of multiple stars only helps reduce the centroid estimation error. It does not cure any mount mechanics.
If your mount is erratic, a less noisy centroid might reduce problematic wild swings. But overall, there is not much you can do except to get a better mount -- the mount is often the weakest link in astrophotography, and where you should spend the largest portion of money on. If you pay more for your camera than for the mount, you should probably change dealers to get better recommendations.
Using multiple stars should also reduce "star lost" cases, since seeing will not affect all the stars within the same exposure; the probability of losing all 12 stars at the same time is like winning a lottery. So, multiple stars will help a little with cameras with poor signal to noise ratio. I don't think it will help with real camera bugs though, like dropping out from USB or producing image tearing.
Multiple Stars autoguiding is neither some magic, nor something new. It is merely a different way to reduce the centroid measurement error without having to increase exposure times. See this paper (DONUTS algorithm, 2013) in the professional world, for example:
https://arxiv.org/abs/1304.2405
Notice that the abstract mentions "high cadence," meaning short guide exposures.
The DONUTS algorithm has been available in INDIGO for some time now (you should find the code in Github); before PHD2 implemented multiple stars. However, it requires very good signal to noise ratio -- the real astronomers just use bigger guide telescopes, and expensive cameras for guiding. INDIGO Sky runs on a Raspberry Pi.
Chen