I have the same issue as Ekato !
I described it in detail in my post:
https://bbs.zwoastro.com/d/26282-dec-guiding-instability-after-meridian-flip-with-asiair-star-adventurer-gti
A summary here:
I’m using ASIAIR with a Star Adventurer GTi in the northern hemisphere.
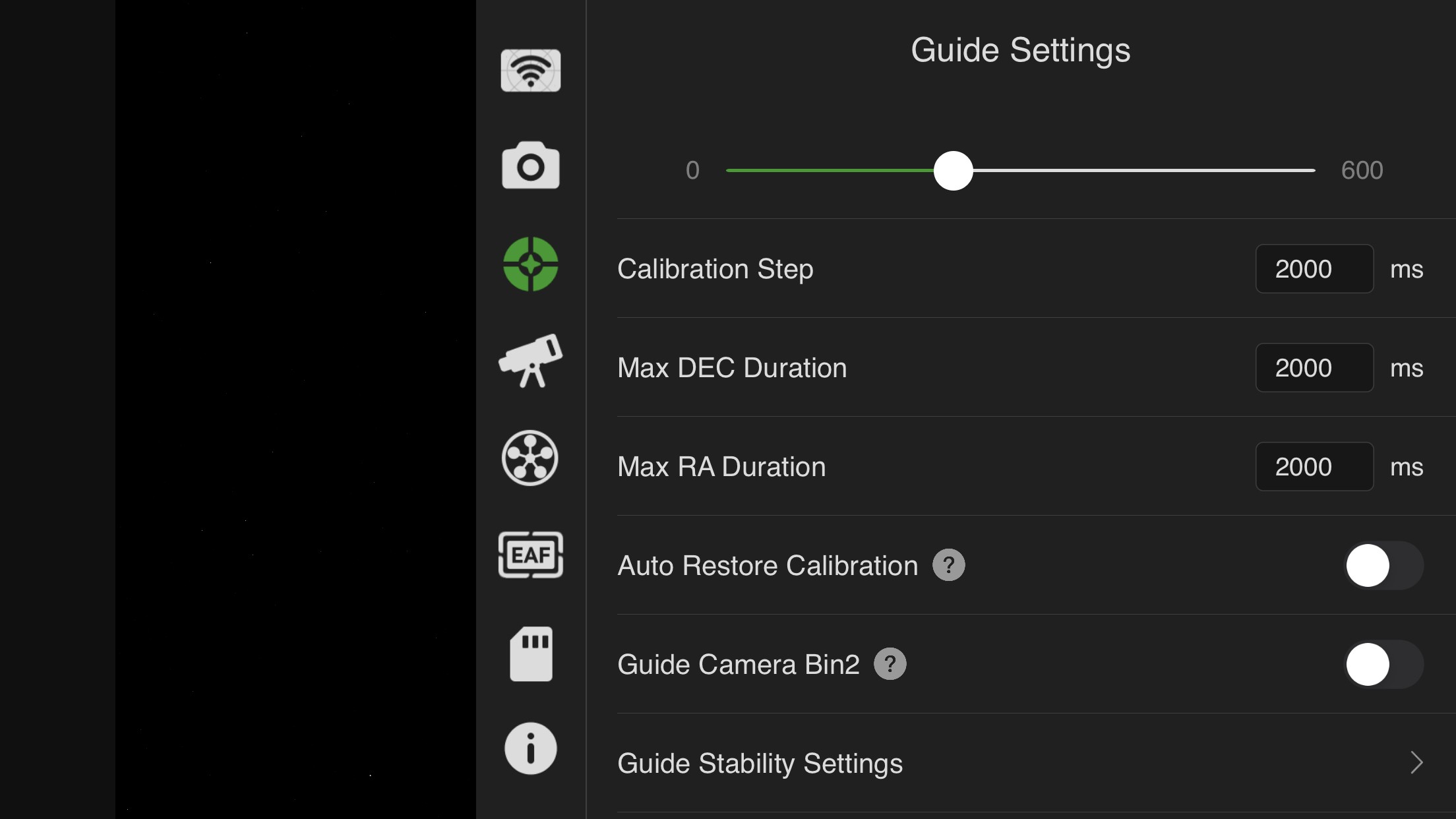
My calibration is done on the eastern side of the meridian, near the celestial equator, with DEC set to Auto.
During calibration I consistently get something that looks unusual compared to the “ideal” pattern:
around 12 steps West and North,
but only 2 steps East and South.
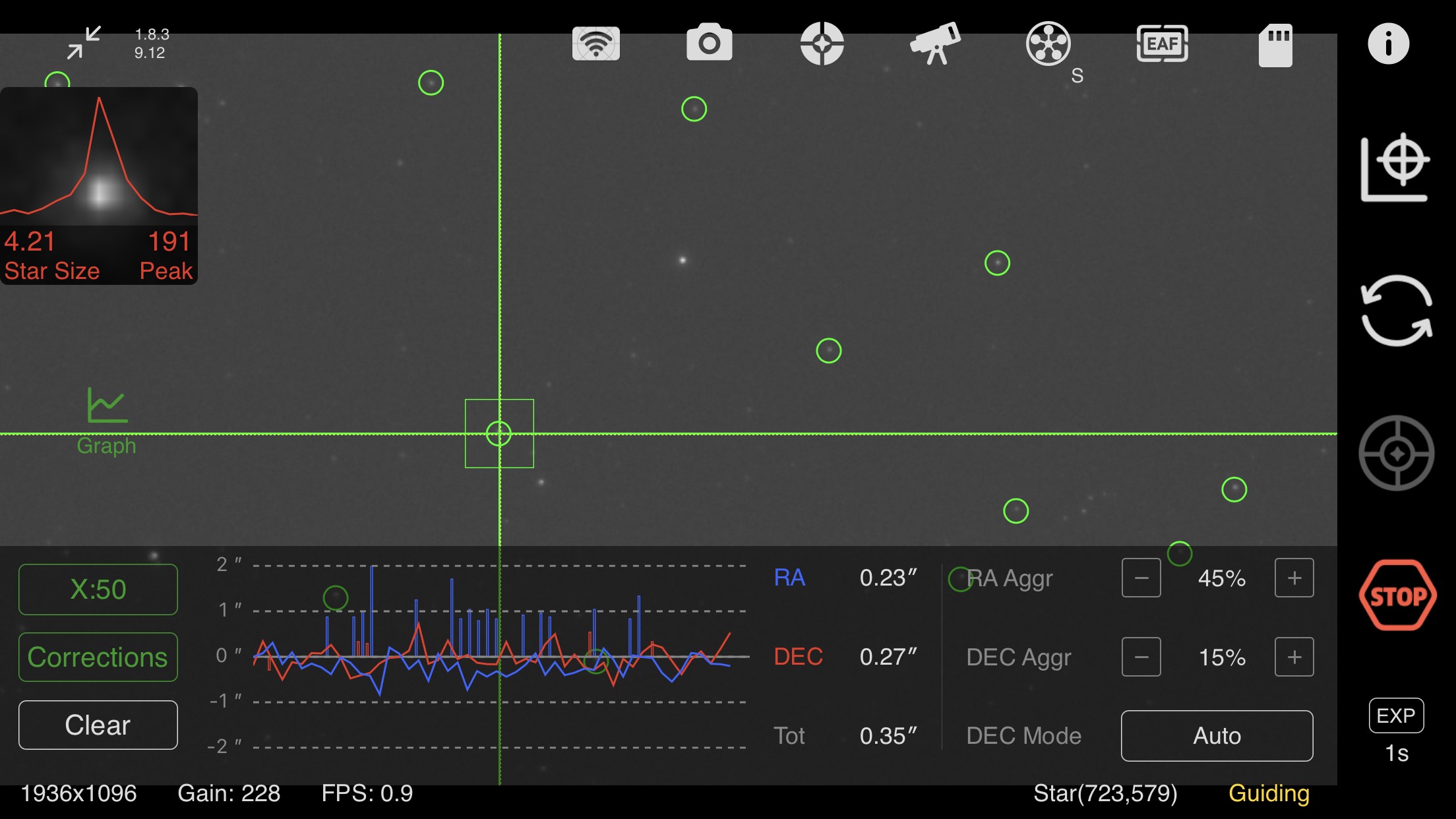
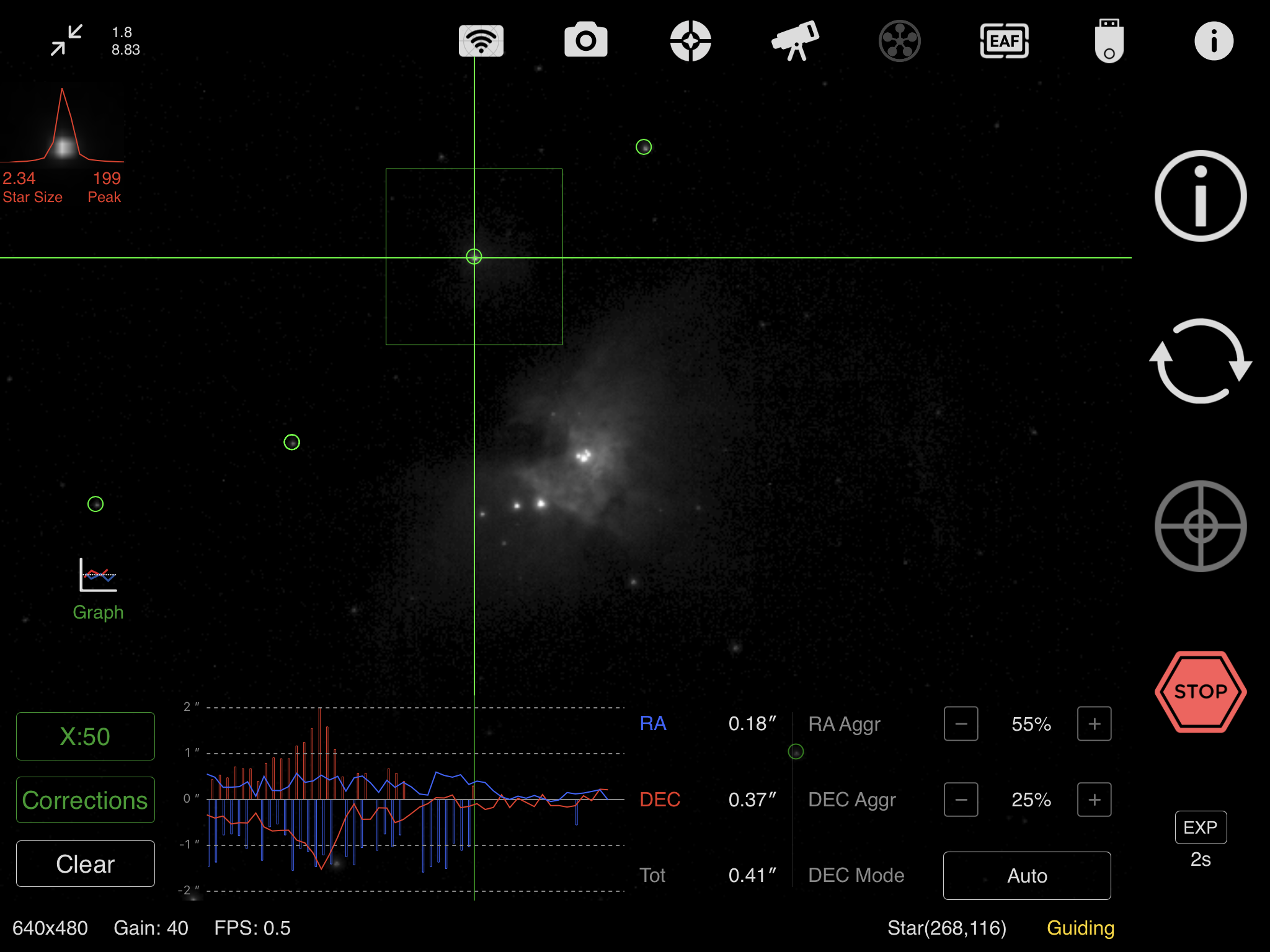
Despite this asymmetry, guiding on the eastern side is excellent — I’m getting around 0.7" total RMS with stable DEC.
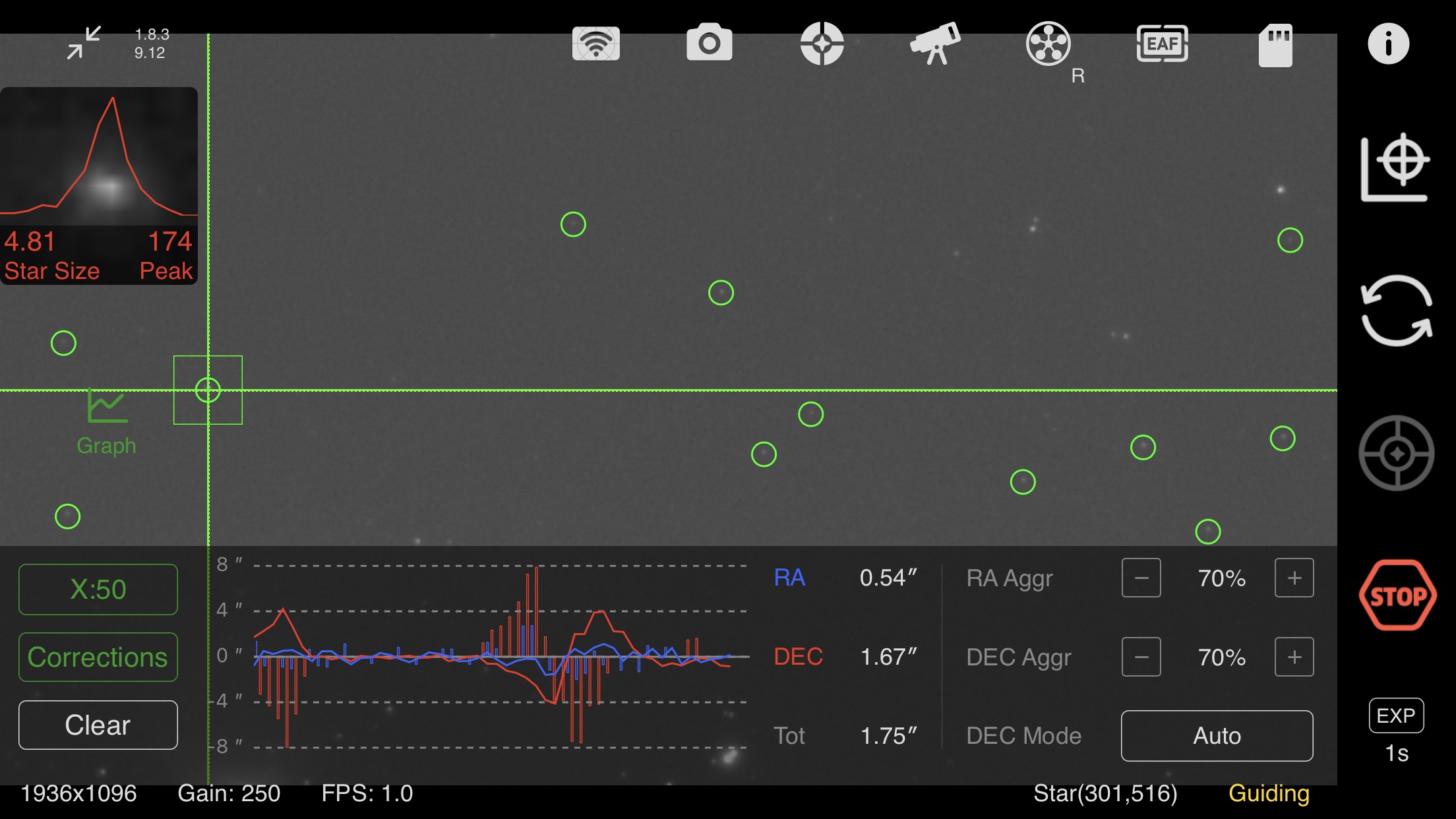
The problem starts after the meridian flip.
ASIAIR performs a new calibration, and from that moment DEC begins to ripple heavily, with no convergence or stability. The DEC RMS jumps to around 2", and the graph oscillates continuously.
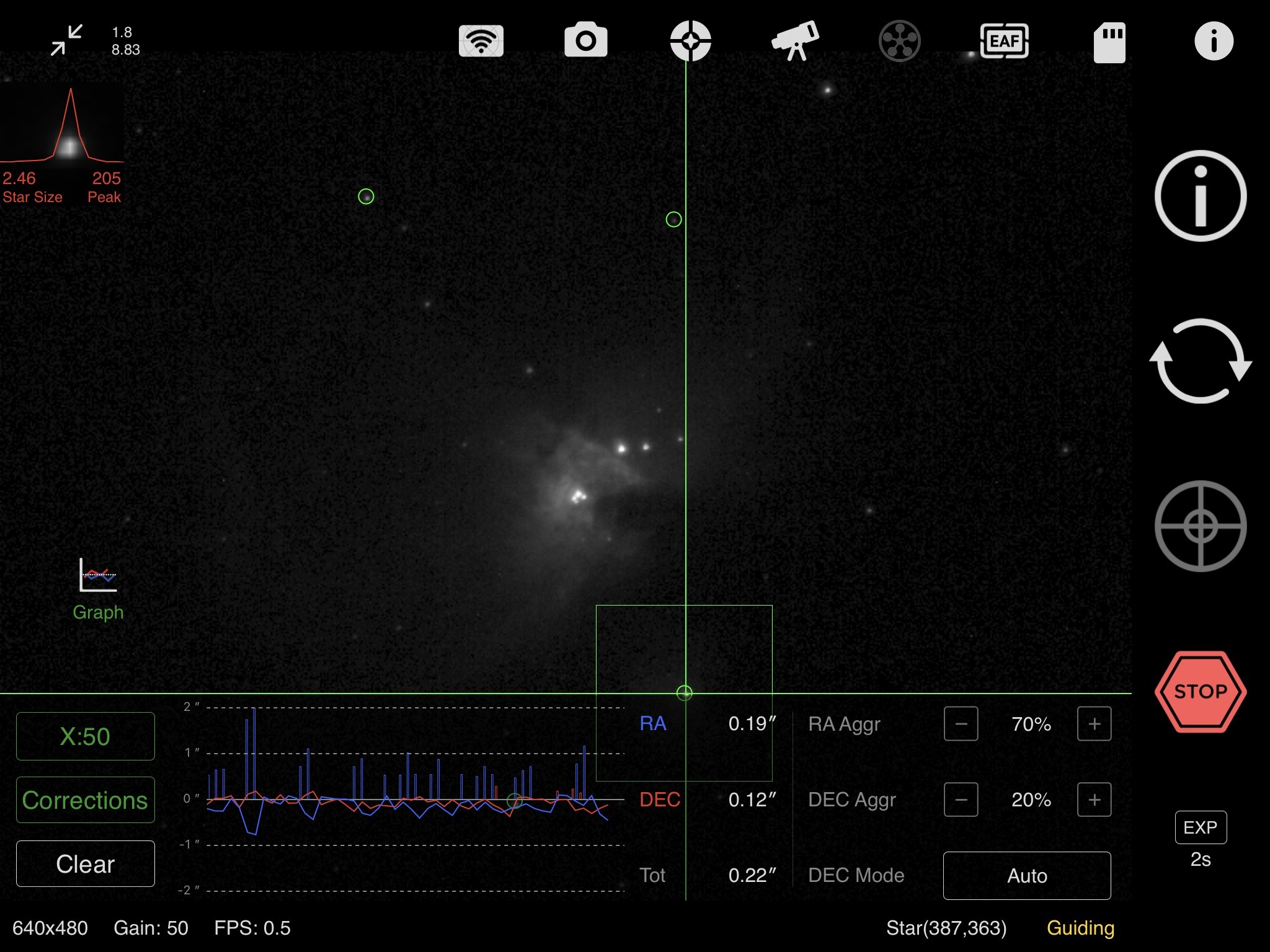
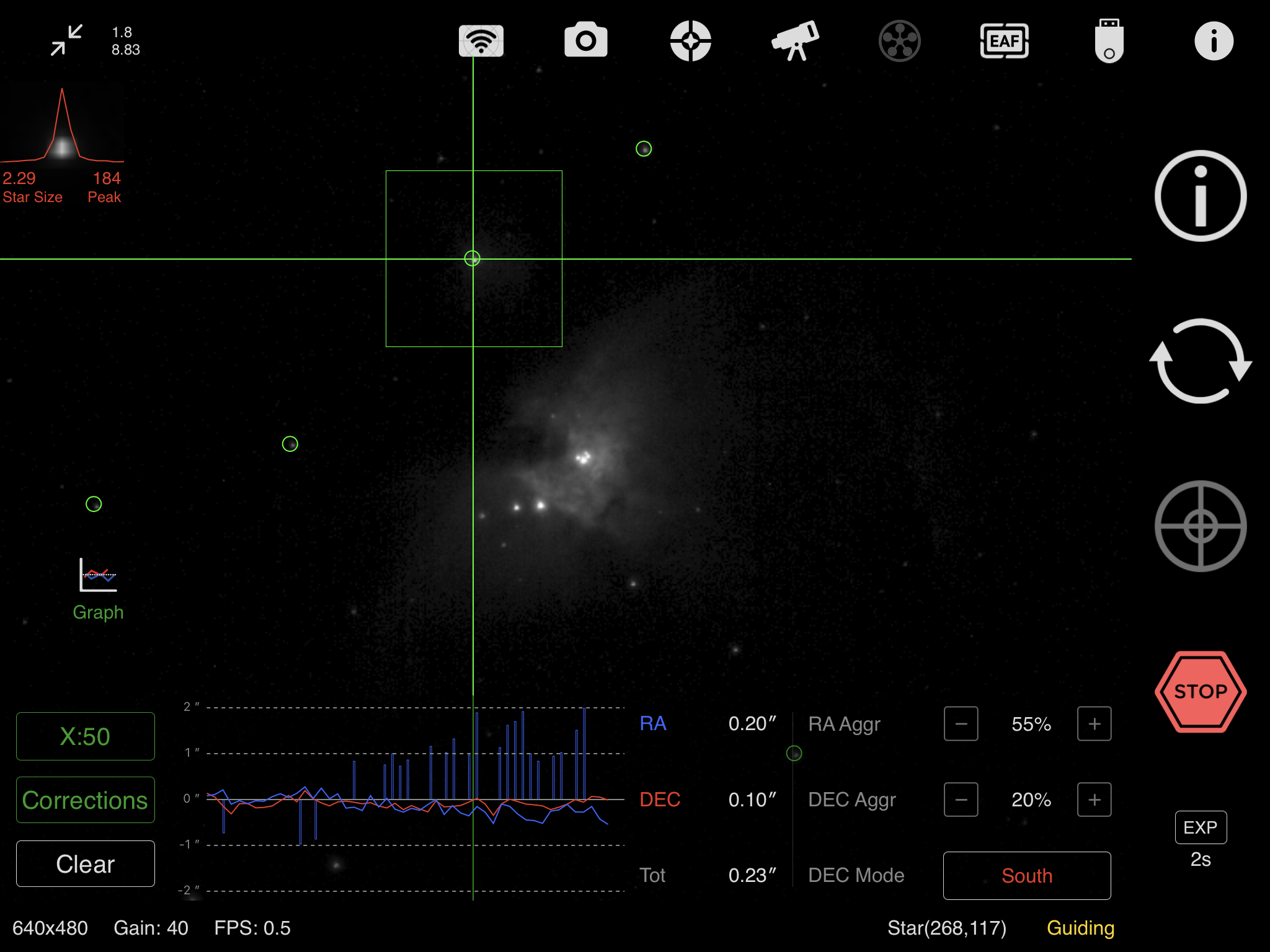
If I switch DEC guiding to North Only and recalibrate, the rippling stops immediately. Guiding becomes stable again and the error drops back to the previous level, with only occasional spikes that correct themselves.
I’ve already ruled out mechanical issues, temperature effects, balancing, focus, and other obvious causes.