dbradf After I learned a little about aggression and max duration, that improved somewhat.
The max durations should be kept small (so that any large error, like wind, will not lead to a wild goose chase; i.e., correcting something that is not mount related and will settle back down naturally).
What is the smallest "max" value needed? -- it depends on the error from your mount. If you know the periodic error (PE) curve of your mount, it is easy -- find out how much worst case amount of rate of change (first derivative of the PE circe) of the mount's gears.
If you had set your autoguiding for 0.5 sidereal rate, that will correspond to about 15 arc seconds per 1000 milliseconds. So a 500 millisecond pulse will move the mount by 7.5 arc seconds. Giving an allowance of a factor of two will be more than sufficient for autoguiding to keep up with your mount's PE.
It is usually a pretty small number. I use 100 to 150 milliseconds for my mount; but do not use someone else's number -- every mount and situation have their own unique characteristics; my mount has very small third order harmonic, for example, so the first derivative is kept small in spite of a large PE. This is why I almost never give out what I use for my settings, so that the lazy folks will not just blindly copy it and end up with wrong settings for their situation.
You may want to use a max pulse length that is a little longer that the one computed from the first derivative of the PE, just so that the mount settles down faster after a dither, or after calibration (the case you were complaining about). I simply prefer to wait a little longer, so I can get better guiding.
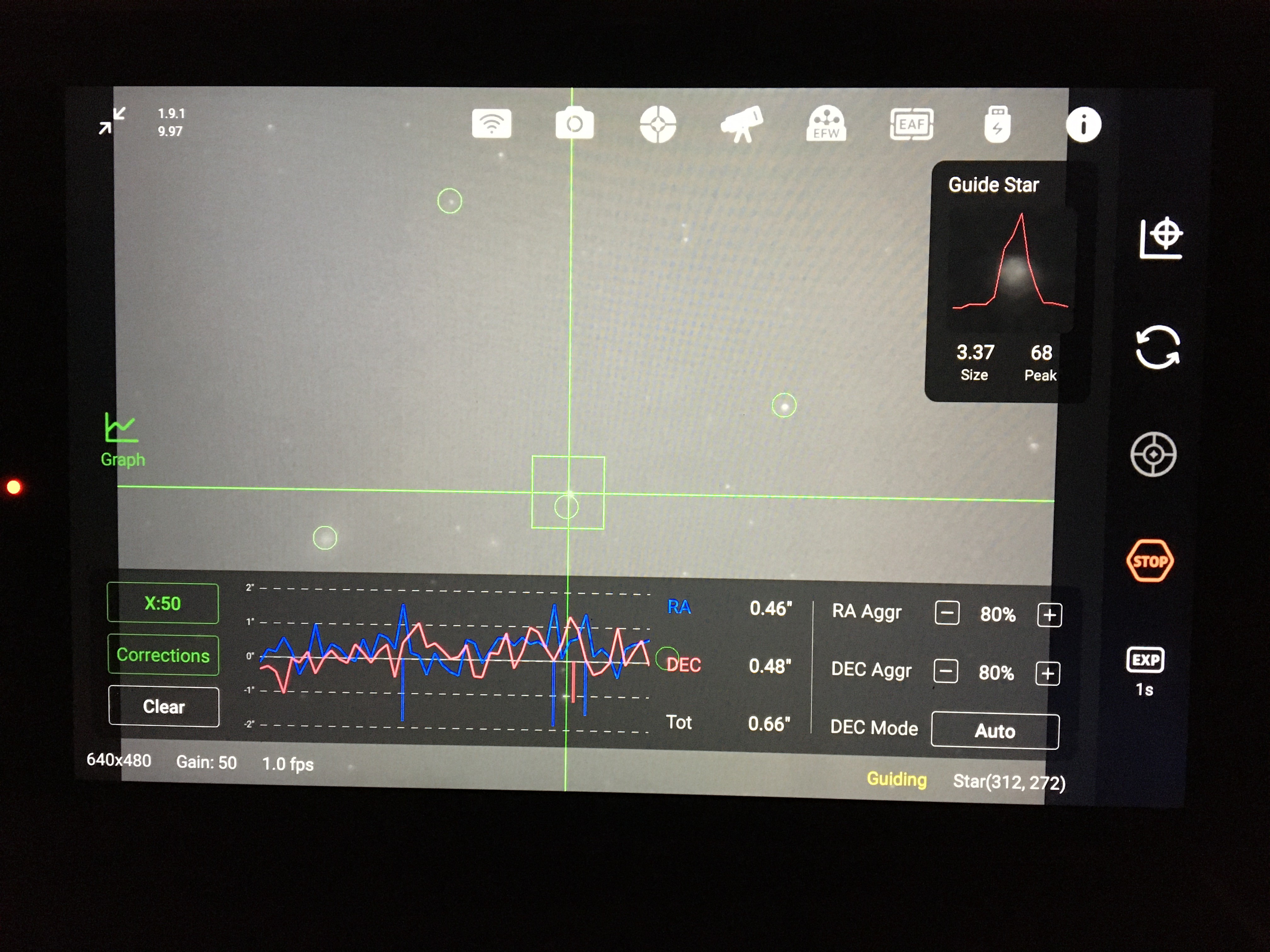
The aggressiveness is basically your classical "loop gain" that you encounter in control theory (I know many people on the forum has had a control theory class in college). You want to start with a low number, like 25% and slowly increase the value until you start to see an oscillatory behavior (the mount starts overcorrecting and the guide curve would swing back and forth by itself). When you see oscillations, back up the aggressiveness number. It is again, another parameter that will be unique for your own set up.
If you have a mount with large PE, you might also need to reduce the guide exposure time. In the past, this had been a terrible compromise to make, because the centroid measurement error would become larger as you reduce the exposure time. However, with multi-star guiding, that has become a non-problem (using two stars is equivalent to double the exposure time, using 4 stars of equal SNR is equivalent to 4 times longer exposure time, etc). The limiting factor has become the sensitivity of the guide camera and the aperture of your guide scope.
I am myself still learning, and specifically gathering enough data on whether near-IR guiding is worthwhile. Near-IR guiding has less measurement error, but it also produces fewer stars for multi-star guiding. If near-IR produce fewer than half the number of stars than full visible light guiding, it then is definitely not worth it.
Finally, unless you use high quality telescopes with very large apertures at a good location, don't sweat the problem. A 1 arc second RMS total tracking error is completely acceptable, due to the Dawes limit of the telescope aperture, the spot size of the optics, and most paramount -- depends on seeing conditions, which is typically of the order of 2 arc seconds RMS even for a good night for most of us.
Chen