KC_Astro_Mutt The Max DEC/RA duration is simply the maximum pulse that will be sent for correction, and has nothing to do with exposure settings. What is the purpose of this advice?
Absolutely bang on!
The Max pulse durations are to keep PHD2 from wrongly issuing pulses to compensate for large errors that are not caused by the mount itself. For example, if you make a mistake in centroid estimation, a wind gust has come through, an owl or airplane flew past your guide star, etc., you want to ignore those large momentary corrections that has nothing to do with the mount. Or, at least to limit the correction by using a max pulse duration hard limit.
Here is the nitty gritty details on how to estimate the max pulses that you really need, and why the ASIAIR defaults for example, are nonsensically large.
Read on only if you are interested in the technical aspects (I know a lot of astronomy hobbyists are nerds, and have day jobs that are technical, and can follow the math :-).
If not, scroll towards the end to find out how much Max guide pulse durations you really need :-).
First, lets assume that the mount is perfectly smooth, i.e., its periodic error is a sine wave. A single non-zero term in a Fourier Series for those who are mathematically inclined.
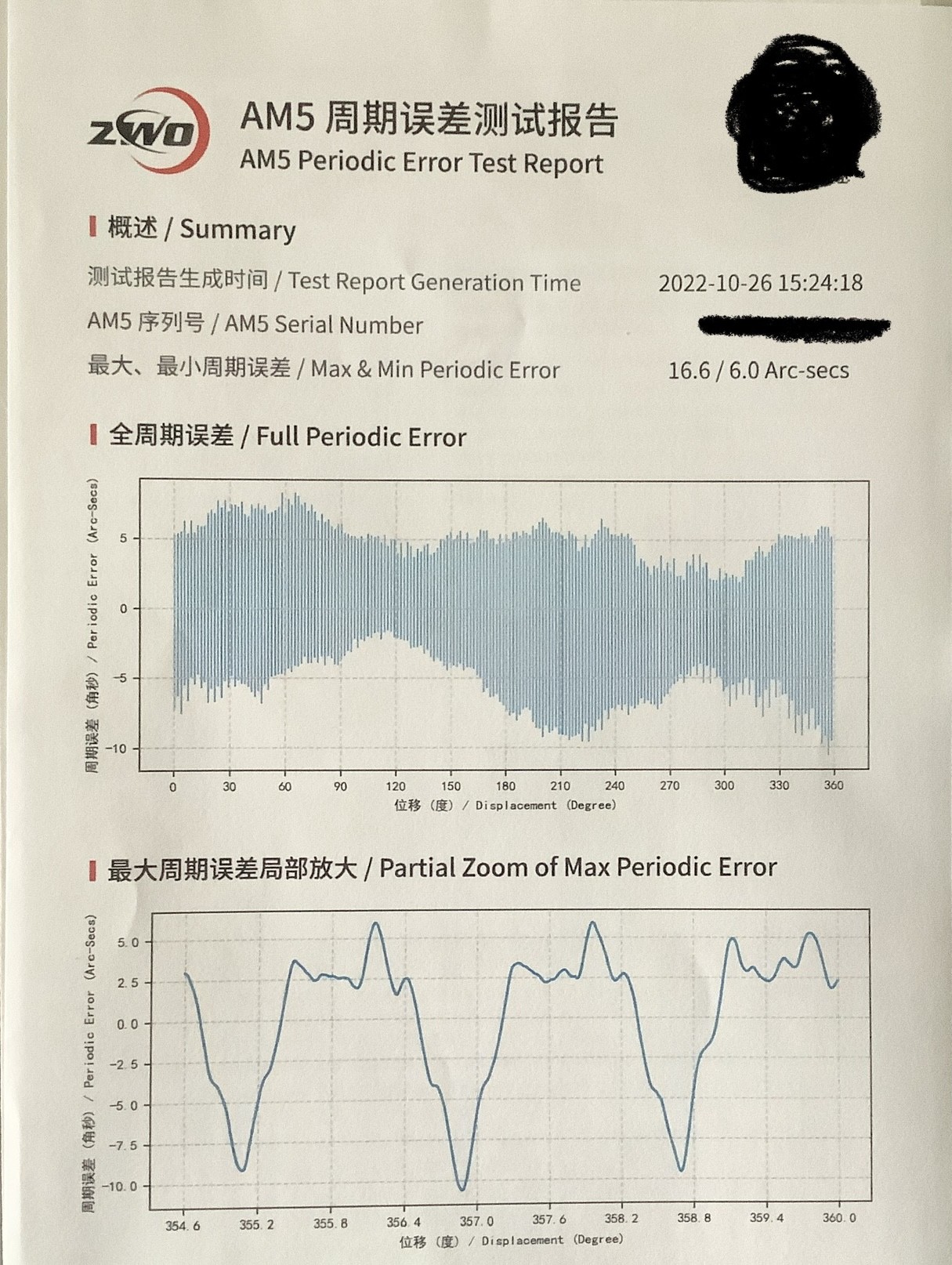
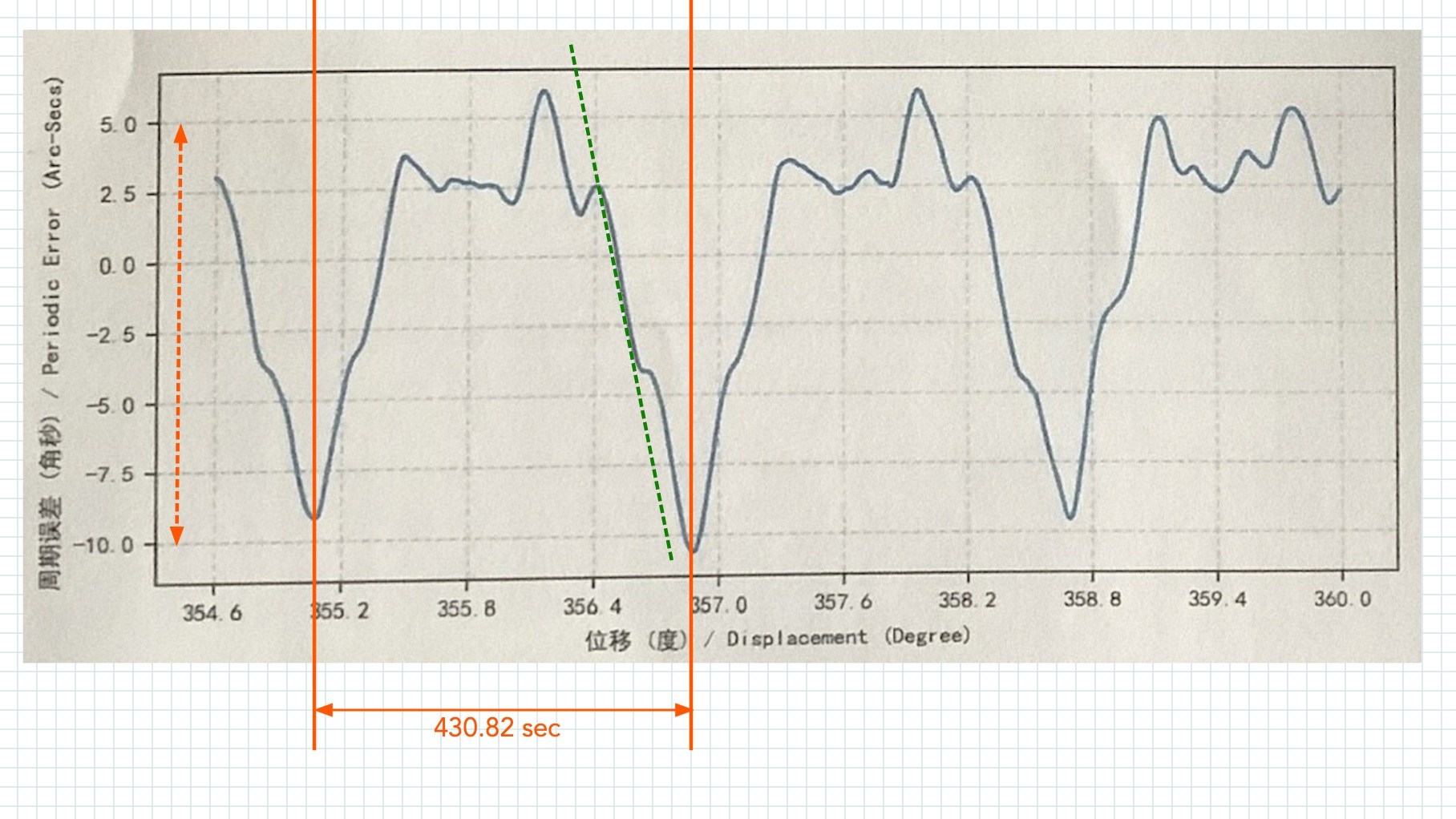
If the curve has no high harmonics, it will look like a sine wave with one fundamental frequency. The period of that sine wave is 430.82 seconds for your particular mount. (Equal to one sideral day divided by 200, in case you are interested.)
The slope (first derivative) of that sine wave is basically (A.2.pi/430.82).cos( 2.pi.t/430.82 ) where t is time in seconds, and A is the amplitude of the sine wave (in this case, A is equal to half of the peak-to-peak amplitude to the periodic error).
The worst-case slope are at t = multiple of pi, e.g., at 0. I.e., worst case slope magnitude is A.2.pi/430.82 (in units of "A" and "t"). (The slope can be both positive and negative.)
This above is how much error a smooth mount itself can make. No more, no less.
Now, to put some real world numbers, assume that A is about 25 arc-seconds (i.e., p-p periodic error is 50 arc-seconds), the worse case of the slope from the above equation is about 0.35 arc-seconds per second.
OK, lets say you are guiding at 0.5x sidereal rate. I.e., the mount will move 7.5 arc-second per second that the guide pulse is on. Does something hit you like a lightning bolt already?
What this says is that for a smooth mount, you only need to apply a correction pulse that is 0.35/7.5 seconds long! That is less than 50 milliseconds.
Now, in real life, a mount will have higher harmonics. Especially strain wave geared mounts (and some strain wave gears have smaller high harmonics than others).
Strain wave gears have been around for a while now (if I recall correctly, the original Mars rover used them to directly drive its wheels). In fact here is a paper about it from a NASA conference in 1991 (not the date):
https://articles.adsabs.harvard.edu//full/1991NASCP3113..237N/0000241.000.html
Go to page 241 of the paper under the section named "GENERAL CHARACTERISTICS." Look at Figure 5 in that section (page 242). Does it remind you of something you have seen?
Figure 7 shows the typical spectrum (i.e., harmonic contents) of a strain wave gear, in this case a real gear from Harmonic Drive LLC (the same place that manufactures the strain wave gears that RainbowRobotics use for the RST-150h, RST-135 and RST-300 mounts. I have no idea what stainwave gear Pegasus uses; it could be Harmonic Drives since they calin European manufacturer, and Harmonic Drive also has a plant in Germany.
Harmonic Drive LLC owns the patent for strain wave gears. The patent has since expired and you now see other starin wave gear manufacturers. But they cannot legally call them Harmonic Dive, since the trademark has not expired. Anyone using the name Harmonic Drive, but using strain wave gears from other companies can run into legal trouble.
OK, back to the NASA paper... the fundamental in Figure 7 is at 2 (not 1) since as the paper says, the errors in a starin wave gear occurs at factors of 2 of the rotation!
So, the 430.82 second period I mentioned earlier corresponds to "2" in the abscissa of Figure 7.
In that particlur sample thatthey measure, the fundamental has an amplitude of about 0.0064 and the second harmonic (at "4" in the abscissa) has amplitude of .0025, the third harmonic's amplitude is at 0.0007, etc.
I.e., in percentage terms relative to the fundamental, there is 39% second harmonic distortion (for folks who are more familiar with audio equipment) and 11% third harmonic distortion, etc.
OK, why are harmonics important? Go back to our first derivative again. Notice that by the Chain Rule in calculus, an N-th harmonic term in the argument of the function will pop out ouside the cosine as a linear factor. So, the third harmonic, will for example, cause the first derivatie to be 3 time larger that the fundamental, but its amplitude A will be smaller due to the low third harmonic distortion.
If you apply factor of 3 to the 11% third harmonic distortion, you get 0.33. This is the additional error for the first derivative on top of the fundamental.
But if you look at the numbers, all of the harmonics, won't really be much larger than the error that is caused by the fundamental buy itself (remember that 0.35 arc-second per second number earlier above?).
So, at least for Harmonic Drives, the higher harmonics will only perhaps double the error from the fundamental. If your mount does not use gears from Harmonic Drives (manufaturing plants in USA and Germany), the harmonics could be different. In that case you can use a ruler and pencil to try to eyeball you periodic error curves abx xompare the worst case slope with the smope when the cureve is smoothest. If that factor is more than two, then you will need to correct at a higher rate than the Harmonic Drive in my RST-135.
In any case, I don't think the non-Harmonic Drive strain wave gears have harmonic content that is more than twice that of the real Harmonic Drives from US and Germany.
Anyhow, based on my RST-135, I should not need more than about 0.7 arc-seconds per second of correction. With a 0.5x sidereal guide rate, this means that my max guide pulses need not be more than 100 milliseconds.
I have set my Max RA and Max Declination pulses to 150 milliseconds in ASIAIR (a far cry from the default) and get very good results.
As mention a little earlier, I suspect that the ZWO strain wave gear has more harmonic content -- at least from observing the curves they have published in their ad copies. But, even if you assume that the strain wave gears that ZWO uses has twice the harmonic content as the one in my RST-135, that 150 to 200 milliseconds should still be ample to handle all the errors from the mount.
I really have no idea where the 1000 ms and 2000 ms numbers that ZWO is quoting comes from. They make no sense at all to me. Guiding pulses are there to compensate for the mount errors, and the mount errors should not get anywhere close to 7.5 arc-second per second to need a 1000 ms pulse!
In the current state (if you are using ASIAIR), the dither recovery may take a longer time with the smaller Max values, because ZWO made the mistake of using the Max pulse duration to also control dither recovery too. Confating two very different functions
Chen
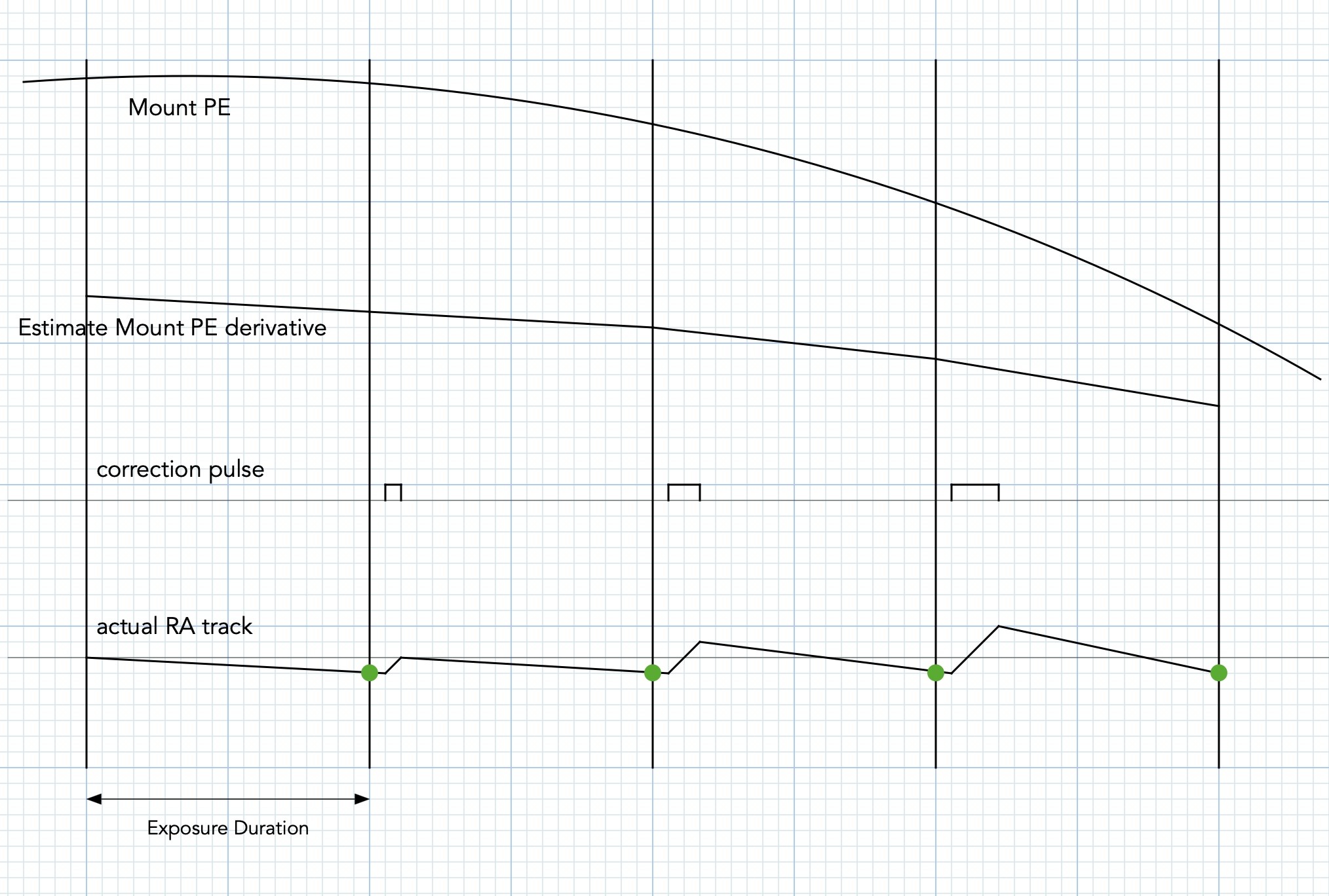
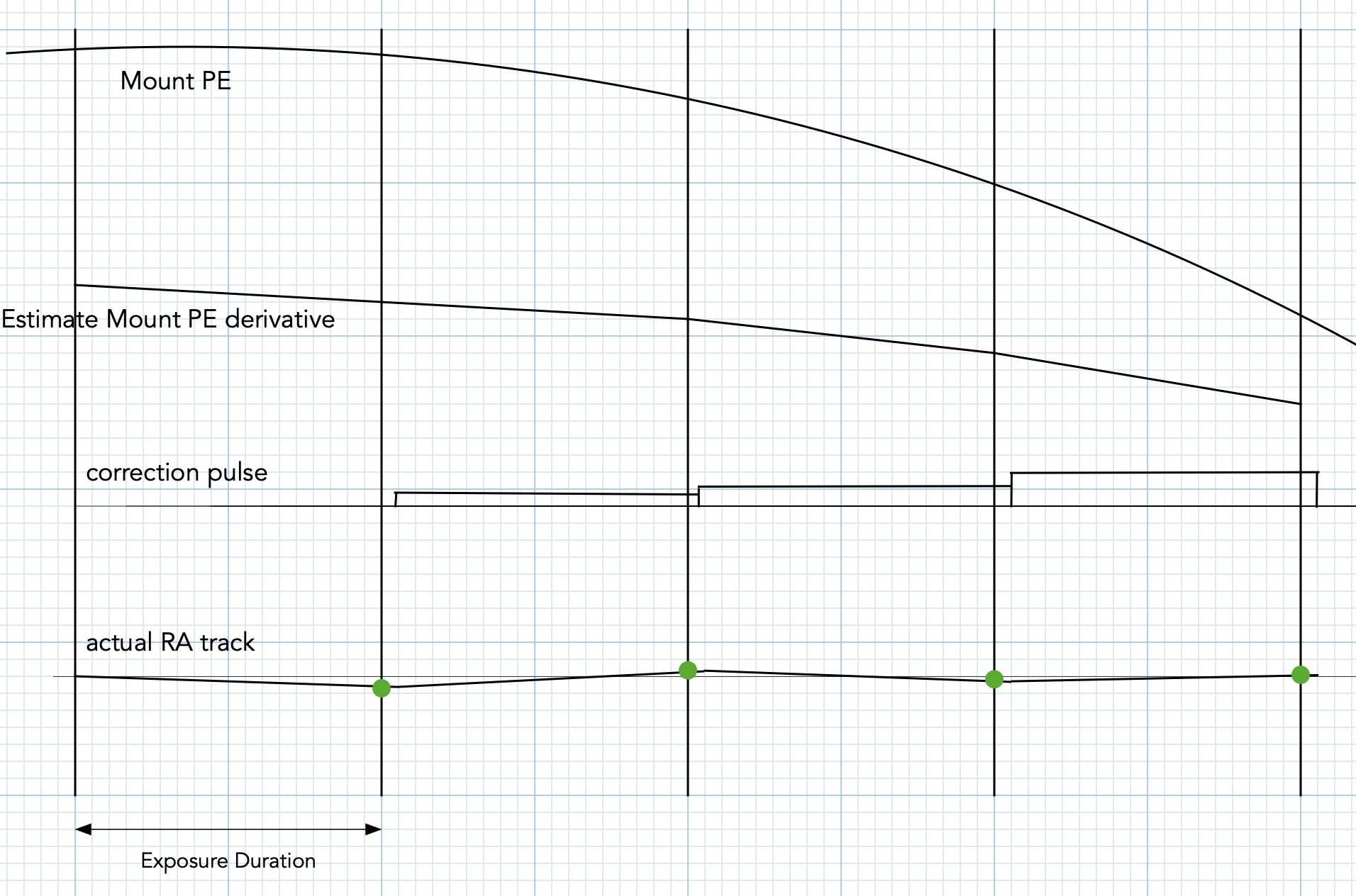
For anyone who bothers to read this far... I have earlier discovered that the ideal guiding for a strain wave gear is to issue many small pulses with high rates. Currently, PHD2 can only issue one pulse per camera exposure. That is why we need to keep the exposures short (I use 0.5 second guide exposures) to get high correction rates (2 FPS).
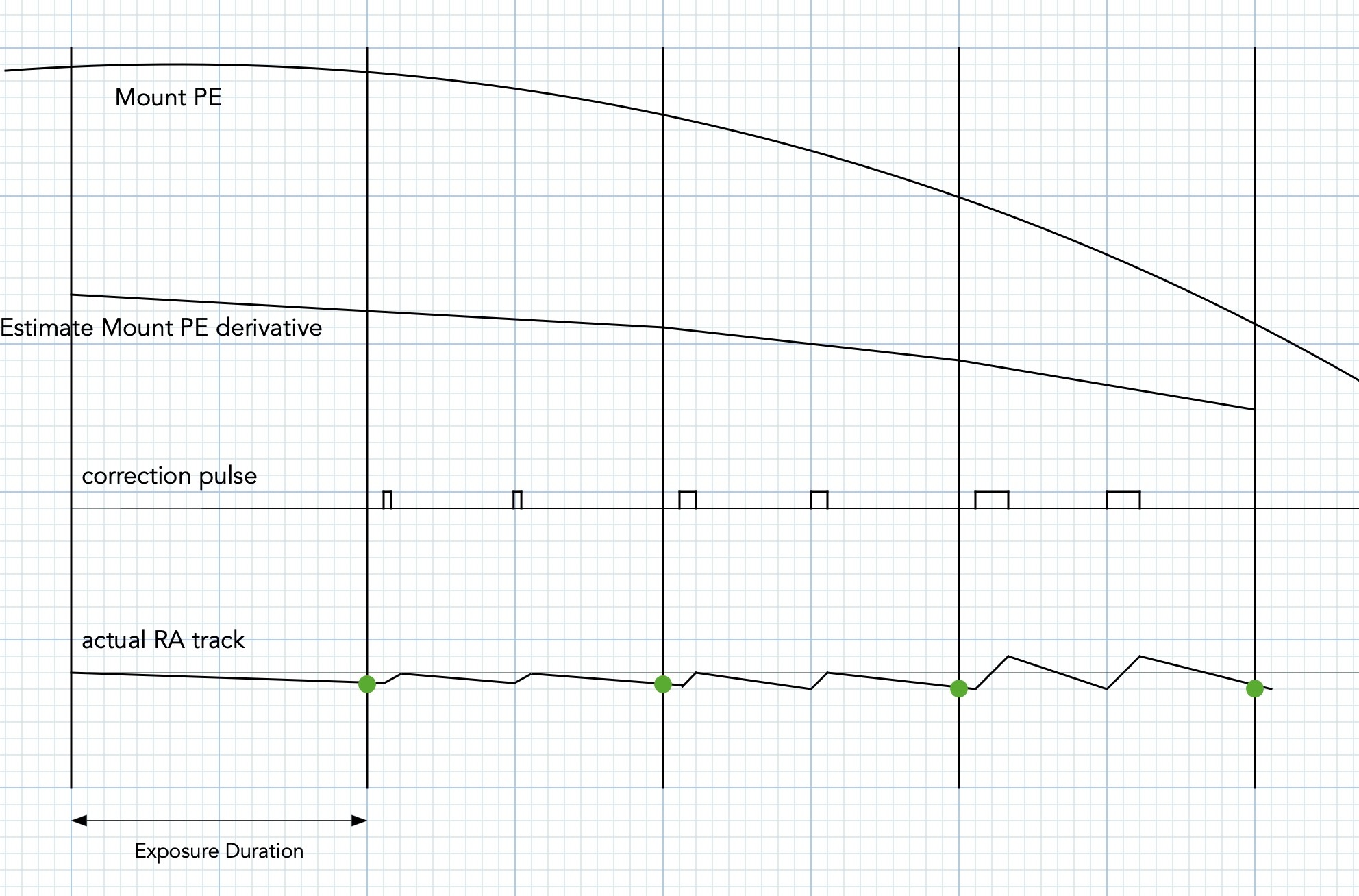
I have started to model a guide system that issues 4 or 8 guide pulses (spead out evenly) per exposure. My simulations has shown so far that that I can comfortably guide a strain wave geared mount with even a 2 second exposure time (the math tells me it can be even longer).
More interestingly even, those familiar will calculus will take the "limit" (i.e., use more and more, but smaller amplitude [e.g., 0.1x sidereal rate] pulses, but repeated more often) until you converge to the limit where the pulses completely overlap oe another to become a continuous pulse that is as long as the exposure duration, but with very small amplitude (like 0.01x sidereal rate). It turns out that my RST-135 guide rate can be controlled in 1/100 of a sidereal rate, so when time comes when I test the "many pulses per exposure" algorithm out (in INDIGO), I will probably also try this "guide by rate" paradigm, instead of "guide by duration" that is done today.