Kevin_A makes me have to increase my pulse duration from 22ms to 350ms to take care of it.
Hi Kevin... you may want to pay some attention when using 350ms for both declination and RApulxes, and guiding at a frame rate of 2 FPS.
The reason is this -- the guide exposure is 0.5 seconds. If that particular guide frame causes both RA and declination to use the full max pulse of 350 ms, depending on the guide program, this can cause the total time of the correction pulses to exceed 0.5 seconds, and if the camera is operating in synchronous mode (streaming), will make the latency to get the next usable exposure frame an extra 0.5 second longer. This could cause some large error for a frame or two.
Now, the mount protocol (the command language") that ZWO uses does allow RA and declination pulses to overlap. I.e., you can send a single command that says "move RA by 305 ms and declination by 270 ms" and the combination should finish executing in 305 ms if the mount firware does the right thing, and therefore not exceed the 0.5 ms exposure time.
However, I have not seen PHD2 make use of such a command. It usually sends an RA correction followed by the declination correction command sequetially, i.e., taks a little bit more than 305 + 270 ms to execute both corrections, and thus would add to no less than 575 ms and exceed the 0.5ms exposure time.
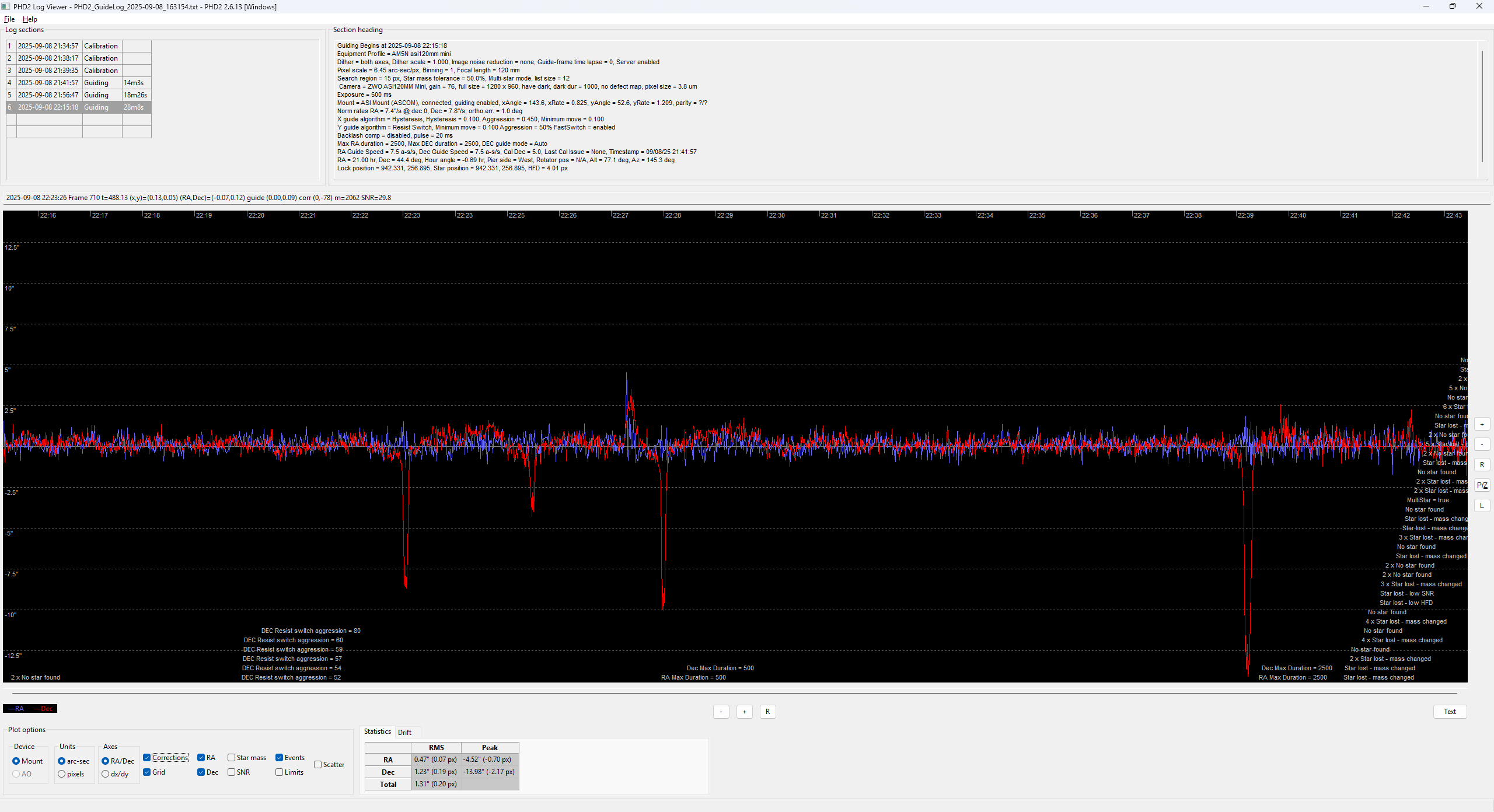
You may want to carefully monitor the guide graph's pulses to see if such a thing happens when you allow the two max pulse to go above 240ms or so when using 0.5 second exposure time.
The good news is that if the two axes are independent (i.e., no mechanical problem that will couple RA error to declination error, and vice versa), the probablility of both RA and declination gears acting up at the same time (and therefore need the full max pulses at the same time) is small. However, a wind gust can cause both to go nuts and guidng to go wild for a little while. It should be something that you can get a "feel" for by watching the pulses in the guide graph.
This is the reason why some mounts cannot use slow, calm 0.25x sidereal guiding, if the 0.25x sidereal guide pulses need to be twice as long as 0.5x sidereal guiding, and it is easy for the total pulse time to exceed 0.5 secs.
Guiding a strain wave mount is like being stuck between the frying pan and the fire. If you increase the exposure to 1 second from 0.5 second, you can then also increase the maxpulse durations -- but then your sawtooth amplitude goes up, and that causes its own problem :-). I am lucky that my RST-135 allows me to use 0.25x sidereal guide rate and still keep the two max pulses small enough (150ms to 180ms-ish) to not sum over 0.5 seconds.
Some strain wave owners would probably think this type of guiding is nuts, but I get it when it is calm:

Was trying to capture the Milky Way a little south of Sadr with a 100mm lens and full frame 6200. I will be trying tonight for the same region, but with the Samyang XP-50 and the APS-C frame. Even the Canon 100L has too much star distortion at full frame. It will be pretty much "first light" for the Samyang since installing an EAF.
Chen