That should be enough to introduce enough drift so that the real declination error is ony to the North or to the South.
I.e., you don't want perfect Polar Alignment, since you will not be able to use North-only or South-only declination guiding. The N-only and S-only will make sure your declination motors will only to commanded to move in one direction, and thus no backlashis possible. Ignore the YouTube novices who try to get within 1 arc second polar alignment without knowing what it means. The seminal paper on field rotation is Hook's by the way:
https://adsabs.harvard.edu/full/1989JBAA...99...19H
(Before days of PDF, so this is a scanned document, unfortunately).
By the way, when you autoguide, the field will rotate around the guide star (or the average centroid of multi-guide stars) instead of your plate center. But again, good post proessors will handle it.
If you need more details, this is what I wrote in an email in 2012 to an ex-Apple colleague. Unfortunately the original paper that I referred to is no longer on the web, but you can probably follow from below:
... you take two stars at the same declination, the difference in N-S drift between a star at the center of the image and a star at a different RA is
[ sin(RA1) - sin(RA2) ].∆/T
The worst case magnitude for the above is 2.∆.sin( | RA1- RA2| )/T
Similarly, from Equation 11, a star at the edge of an image frame that is at the same RA as the central star has an E-W drift of
[ sin( decl1) - sin(decl2) ].cos(alpha).∆/T
worst case magnitude (cos(alpha)=1) again in the same form of
[ sin( decl1) - sin(decl2) ].∆/T
And again using the sin(A0-sin(B) formula, the worse case magnitude difference is 2.∆.sin( |decl1 - decl2| )/T
Ergo, if for an image frame is P degrees wide and P degrees tall, and assume the central star is perfectly tracked, the worse case (due to field rotation) movement of any other star is
∆.sin( P )/T.
Since sin(P) is smaller than P, we can bound this by
∆.P/T .
∆ is the angle error of the polar axis. T is 3.8 hours per radian.
So, if the polar axis is off by 1 degree, the worst case movement of a star at the edge of a frame that is 45 degrees wide (a typical 50mm lens and a full frame 35mm camera) in 1 hour, is
0.017*0.78/3.8 = 0.00351 radians = 0.2 degrees.
If the width (or height) of a frame is 1000 pixels), the worse case drift at the edge of a frame is 1.7 pixels.
Not too bad as worse case for a 1 hour exposure and a 50mm lens when the polar axis is off by 1 degree. With a 100mm lens (and same pixel resolution), image rotation for a 1 hour exposure is not a problem. If we only need 10 minute exposure, it should be easy to polar align and get no rotation problem.
We just need to track the central star to better than 1 pixel.
I had bolded the part that should be interesting for you. The ex-colleague is an Eclipse chaser -- he has flown to every solar eclipse since about 2007, so the focal lengths are in terms of camera lenses.
If the above is not enough, and you need to drill in further, you might be able to find the original paper from the WayBack site. I havent tied, but it is this one:
http://www.whim.org/nebula/math/drift.html
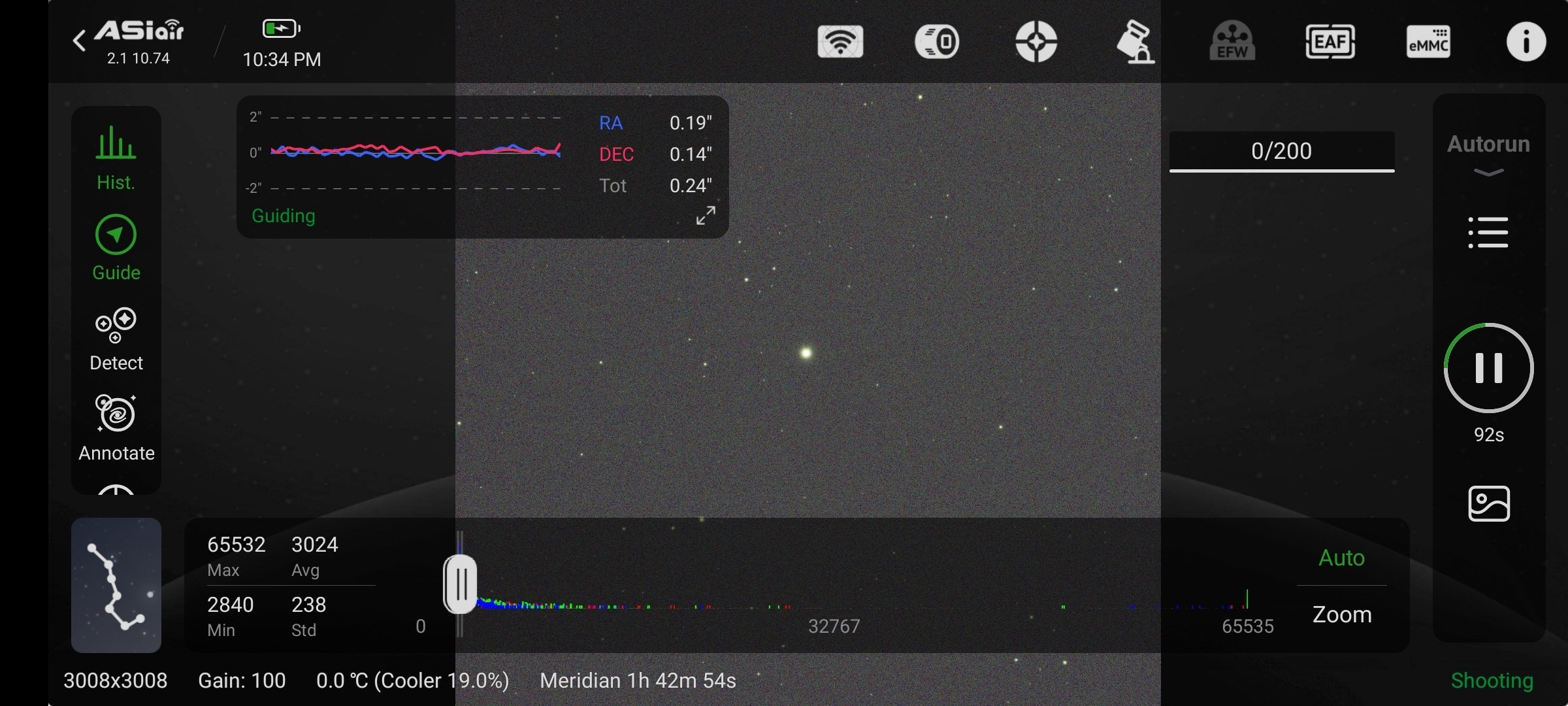
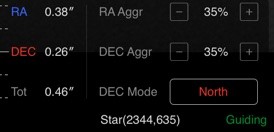
In your case, you can just look at the drift on the graph, then choose North- or South- only depending on the correction pulses.
Note from the magnitude of numbers that someone who tries to get within 1 arc second of polar error (just check the ZWO Facebook site) is either very stupid or very ignorant (probably both, if they use Facebook in the first place).
Now, after a Meridan flip, a German mount (the ZWO mount has pretty much the same behavior as the original Fraunhofer mount), I think that you will need to also flip N-only and S-only. Just watch the declination drift, if it is drifting away without correction pulses, just toggle to the other compass direction.
Chen