MrAstro how do I calculate the Max duration of Ra and Dec.?
The max pulse duration limits the amount of correction PHD2 puts out when the centroid measurement indicates that a star has moved. It limits the amount of correction that is not related to the mount.
The length of a pulse depends depends on your guide rate.
If you have chosen a 0.5x sidereal guide rate, that corresponds to the mount moving by about 7.5 arc second per second of time as long as you keep the pulse active. (Again, there is a small factor of sidereal to solar time conversion, but that's splitting hairs.)
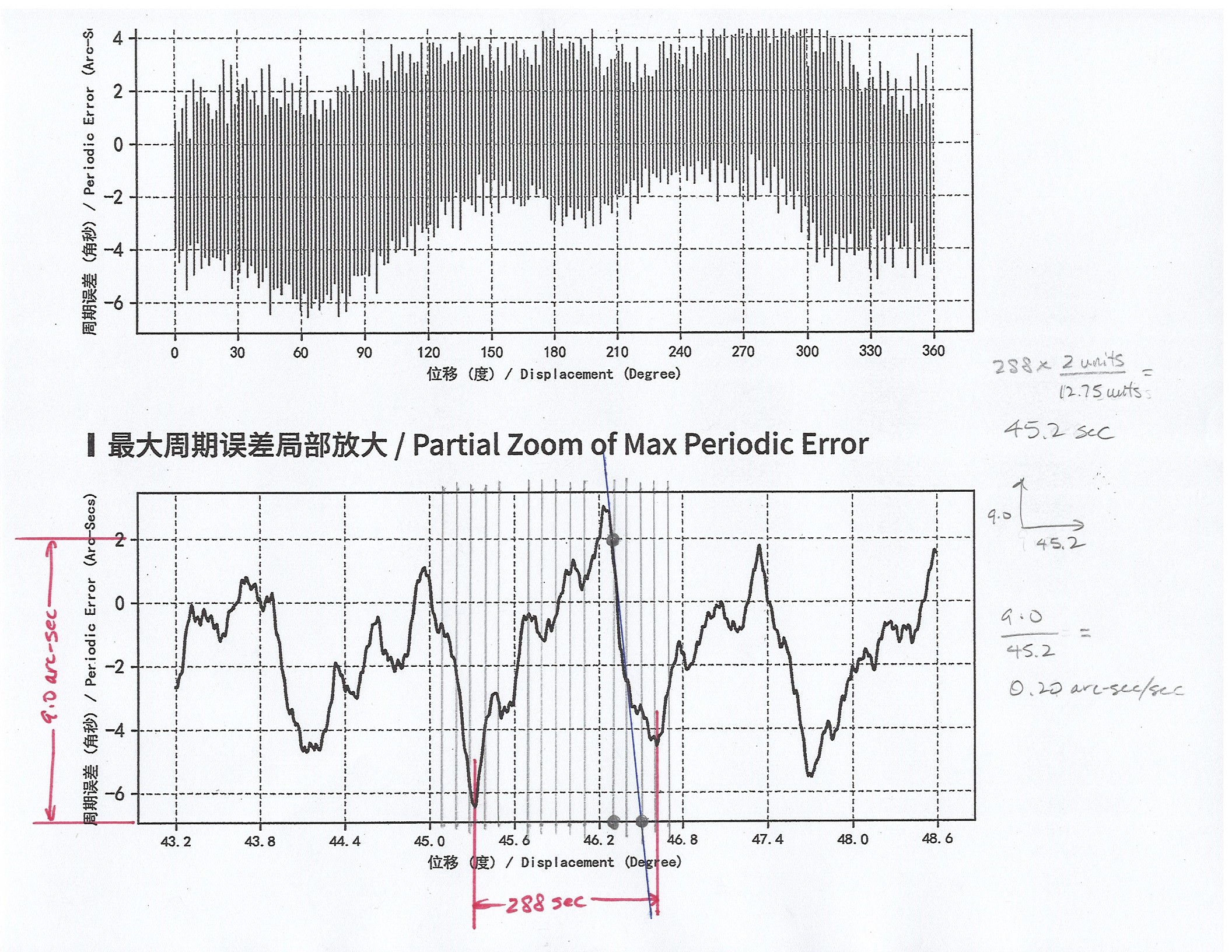
Notice that this value (7.5 arcsec/sec) is also a first derivative, just like the worse case slope of your mount's PE.
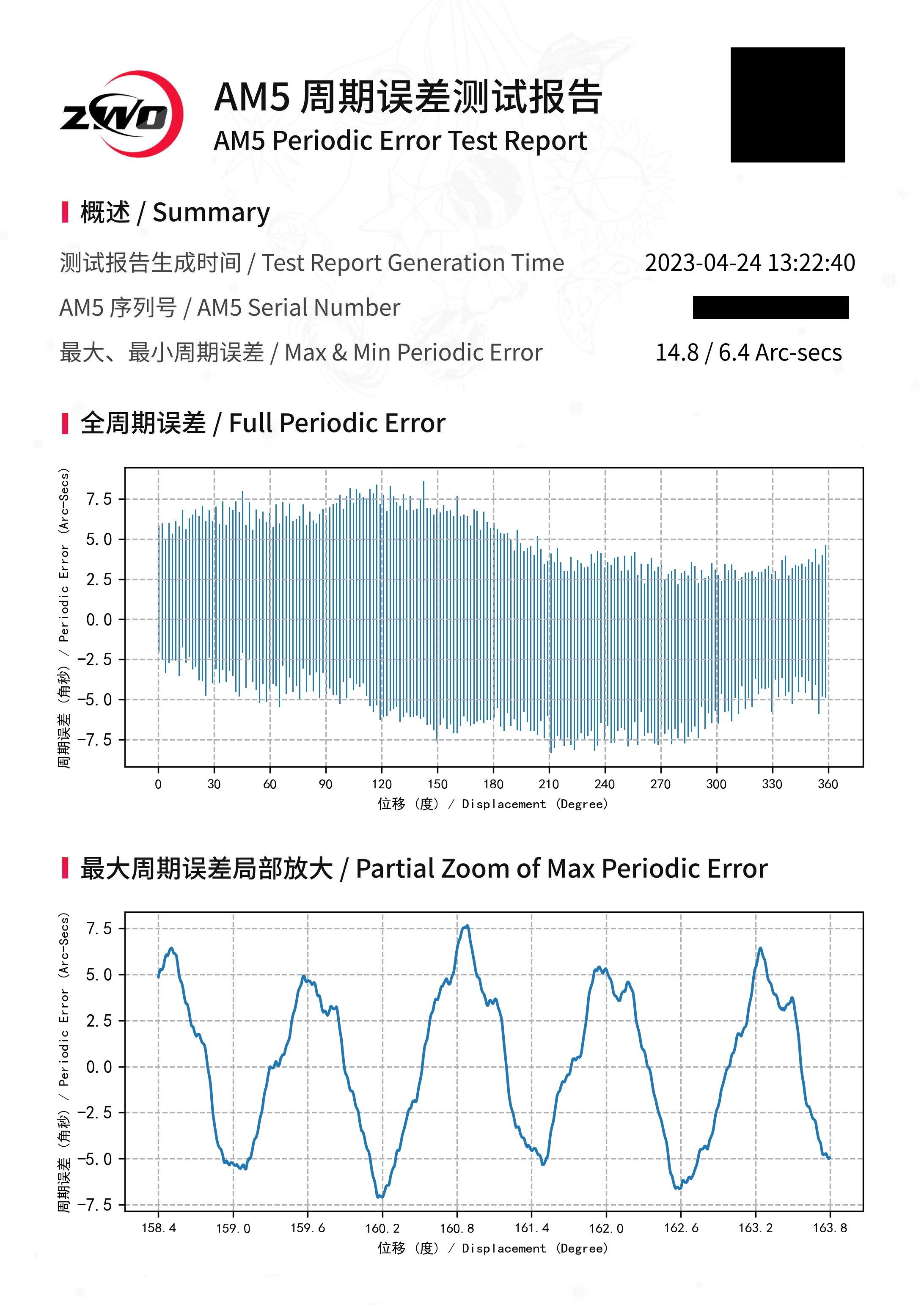
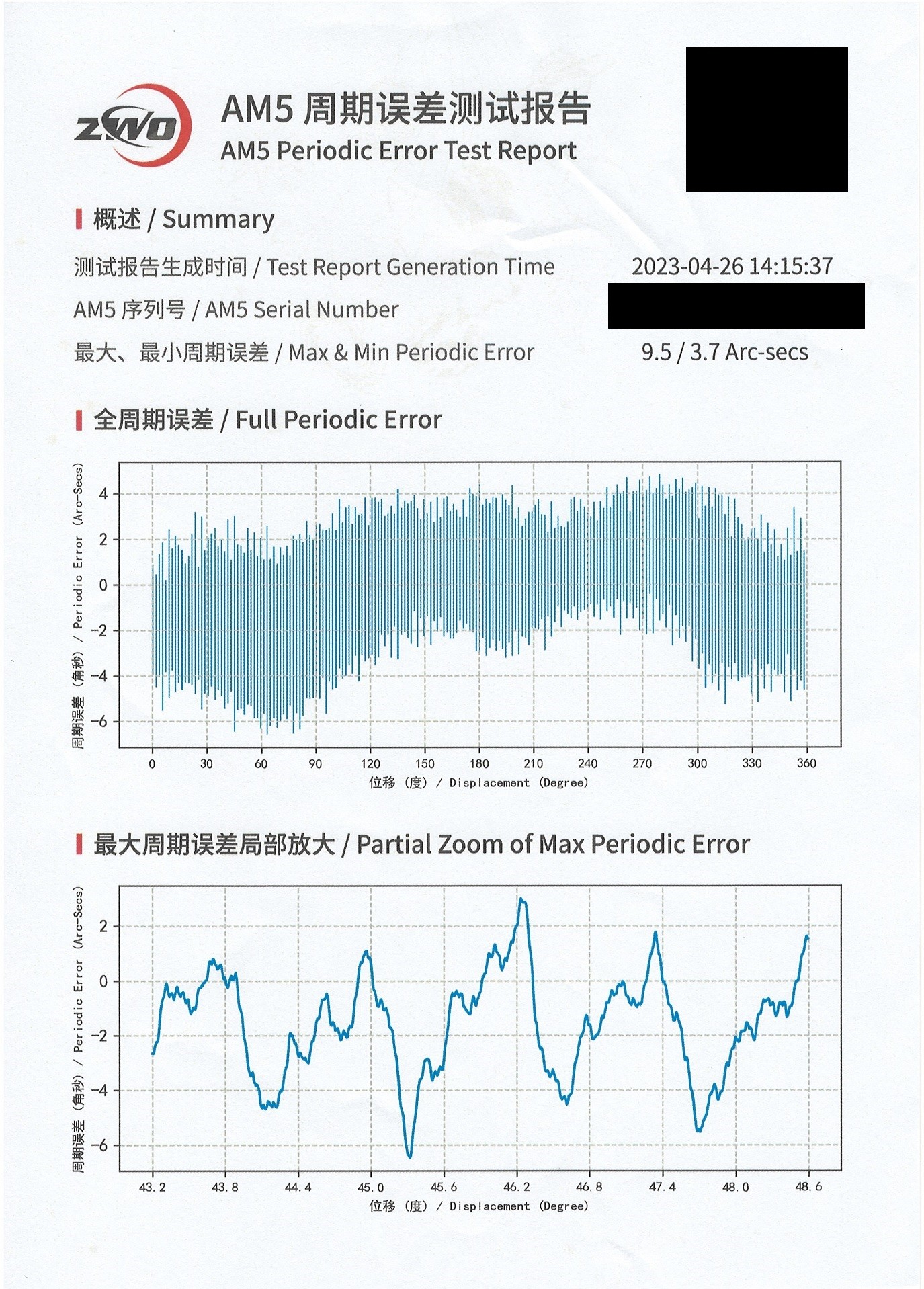
Lets say your worse case slope is 0.35 arcsec/sec (yours is bound to be a bit worse since ZWO did not show the part of the graph with the worst slope). That would mean that a pulse that is 0.35/7.5 second long is sufficient to correct for any mount error. That's 47 milliseconds. If you assume that the worst case slope is more like 0.5 arcsec/sec. then the max pulse needs to be increased to 67 ms (still a far cry from the 2000 ms that ZWO recommends).
The short pulses will limit the amount of correction to just the mount's gear errors. It does not account for wind gusts, someone walking near the tripod, centroid estimation error, etc. But it is not supposed to -- it should only correct for mount errors, just like a Renishaw encoder will not correct for those errors either. We are simply replacing the scales of an optical encoder by using stars instead of a glass plate.
Now, if you use 0.25x sidereal guide rate, you would need to double the pulse durations too. I.e., 67ms from a 0.5x sidereal rate becomes 134ms for 0.25x sidereal guide rate. You will find that a slower guide rate also reduces the amplitude of the "sawtooth." At some point, the mount corrections are small enough that centroid estimation becomes your biggest problem.
As to the declination max pulse duration, you are out of luck, since there is no data from ZWO. Just start with about the same duration as the RA pulse duration, and increase it if you find that the correction pulses cannot keep up, or reduce it to limit the movements even more than the RA movement.
Declination has a whole set of different problems since backlash is a problem there. There is never backlash problem when autoguiding the RA axis as long as the guide rate is limtied to less than 1.0x sidereal rate. (I.e., the motor will always move in the same direction.)
Chen