Using multiple stars should also reduce "star lost" cases, since seeing will not affect all the stars within the same exposure; the probability of losing all 12 stars at the same time is like winning a lottery.
Well, I'll be a monkey's uncle. I won the Star Lost lottery last night!
Seeing was not very good. The star picture in the top left corner of the auto guide window was mutating to all kinds of shapes, very rapidly.
When that happens, one usually packs up for the night. But I wanted to see how much multi-star autoguiding helps.
Seeing was so bad, even the calibration stage produced a slightly non-orthogonal red and blue vectors. The two vectors in the Calibration Data popup shows up to 15 degrees of non-orthogonality. I recalibrated a few times to get better orthogonality and settled for some 5º off. So, there will be a few percent of RA correction applied by mistake to the Declination motor, and vice versa.
Multi-star picked a good number of stars (sometimes up to 12, but sometimes as low as only 7 stars).
Then the terrible thing happened.
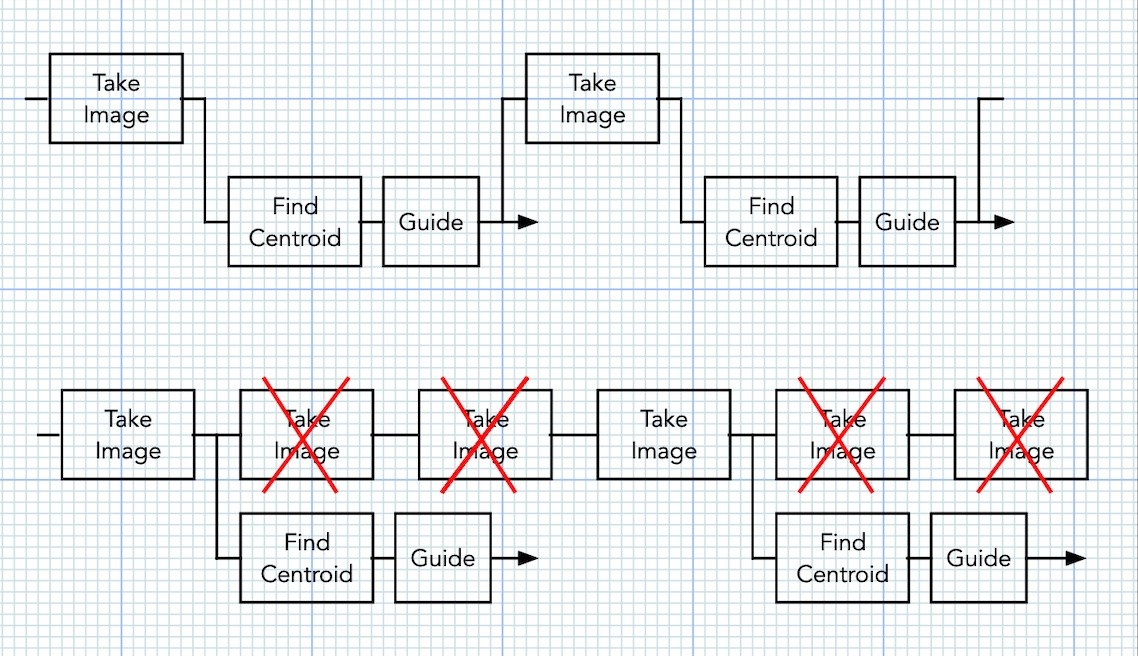
Slowly, over the course of a few minutes, one by one of the green circles disappeared!
You expect one or two star loss when seeing is poor at the stars' location, but they should come back again when the turbulence leaves the star after a guide plate or two. In the case of ASIAIR, those dropped guide stars never came back.
Eventually, all stars dropped out and I lost guiding completely :-). They never came back even when the condition for each star improves. I have already written ZWO about this, so by the time there is public Beta, it might be fixed.
When I restart guiding after the stars are lost, all the guide stars magically reappeared. This should be a simple algorithmic bug to fix.
I had also suggested in my Beta feedback that they initially identify more candidate stars, even if the Raspberry Pi can only handle say 12 of them (seems to be the number they chose at the moment) while it is in the middle of autoguiding. So, when a star is temporarily lost you can pick the alternate stars and still be guiding with the maximum number of stars.
While the guide stars were slowly disappearing, I could see the Total RMS error climb -- so multi-star is indeed working; fewer stars, bigger error. And even with 4 or 5 stars available, multi-star seemed to be doing better than single-star.
The other thing is why should stars drop out to start with -- I got an answer from them that they are using HFD to determine hot pixels. When the star shape ever jitters so that the HFD is below a threshold, it is marked as a hot pixel and it is no longer identified as a star and hence the star is lost! (I have submitted a suggestion of a more robust way to find bad pixels during the calibration phase that won't cause a real star to be misidentified as a hot pixel while guiding is ongoing; this might fix the single star "Star Lost" problem too, we shall see).
By the way, the smaller MinMo seems to help with my mount (harmonic drive gearing). Even with poorer seeing, I seem to get better guide numbers than I get from ASIAIR v1.5.3 (1" last night vs 1.3" typically with v1.5.3). Still not as good as v1.3 days, but seeing was also horrid last night.
With hindsight, it is good for ZWO not to push the Beta yet to everybody. Beta is suppose to be for people to test and feedback problems, it is not for the casual user to get a new feature -- for most companies, that comes in the GR, general release.
By the way, ZWO does not appear to follow the Golden Master (GM) paradigm -- a final beta before the full release. I have seen the build number skip a few updates between the last available beta and the general release. This means that there were some changes that never went through external beta. That's like playing Russian Roulette.
The problems that I have encountered so far in Multistar guiding require simple fixes (seems to be algorithmic and mathematical in nature, so far), but they will probably mislead the casual user into thinking multi-star autoguiding does not work on ASIAIR (remember my earlier comment about scaring horses and children). Beta feedback is also merely feedback -- there is no guarantee that ZWO will fix the problems that you submit, or accept a single recommendation.
You probably need to be a shareholder like Warren Buffet to get them to listen more seriously to every bug report :-) :-).
Chen