billx Chen, I never used a ST-4 cable before. I don't know if I can find it out of the stuff I have. How would I hook it up? Wish I could help more.
Please don't waste any time, Bill, if it is not a 5 minute exercise for you. This is ZWO's problem after all, not the customer's.
For what its worth, ST-4 is a cable that has an RJ-11 connector at the camera end. So it is identical to the telephone cable from the set to the wall (in other words, a smaller, fewer pins version of the Ethernet RJ-45 connector). (A even smaller version, the RJ-9 is used in corded telephones to connect the handset to the base.)
Most mounts also use RJ-11 on the mount end of the cable. And with many mounts, it is a one-to-one cable. The problem is that not all mount have 1-to-1 wiring. Then there is the Takahashi Temma controllers, which use a mini-DIN at the mount end. That is why, if you haven't already been using ST-4, it may take some head scratching and document searching and cable splicing :-).
ST-4 is not really magical, and the ST-4 connector in a camera is not something very special.
Back in the very old days, you guide by staring into a very long focal length guide scope with an illuminated cross hair (I still have one of those eyepieces :-) and use the RA-Dec buttons of a hand controller at the slowest speed, like 1x sidereal, to visually keep a guide star centered. That is also why guide scopes come with the tube rings, so you can center your main camera on the target and recenter the guide scope's cross hair of a guide star. It is definitely not for the faint hearted. Back then, film weren't cheap either, so you don't want to ruin a frame by improper guiding, and you keep a hat handy when a plane comes by (no pesky Elon Musk satellites to deal with). Most of us had our own darkroom (ah, the smell of D-76 and Dektol :-) so we don't have to wait the one week turn around at the drug store.
During the digital camera era, someone smart came up with the idea of using a camera instead of the human watching a crosshair. And instead of the human pushing buttons, the mounts were modified so that they would make movements through 4 pairs of wires. If one shorts out the wires of the RA+ pair, the mount would make a motion in the positive RA direction. Likewise the RA-, DEC+ and DEC- directions.
At that time SBIG decided to market a cheap camera just for autoguiding (cheap by SBIG's standards. that is). SBIG still some of the best astro cameras, but if you are shopping ZWO, they are probably not in the same ballpark.
I still have my SBIG ST-8300 but haven't used in some half dozen years now, at least. Most of SBIG's cameras had a "ST" catalog number, and they called this "cheap" camera the ST-4!
http://www.company7.com/sbig/products/st4.html
As you can see from the historical picture, the entire ST-4 package includes a large control box.
From that time on, anything that directly controls the mount to auto guide are known as ST-4.
With today's guide cameras, what happens is that there is some circuitry that piggy backs on the USB chip set that usually carries just the image data and control. The circuitry (really firmware in a microcontroller chip) decodes USB commands and convert them into the RA+, RA-, DEC+ and DEC- contact closures.
There are no voltages in the four pairs of control signals. Simply contact closures (switches). Most of the time just using transistors switches, but I have seen some old designs that used reed relays. There were a lot of home brewing back in the old days; playing with technical things was one of the main attractiveness of the astrophotography hobby. The more complex the problem is, the more the nerds are attracted it. Unfortunately that has changed a lot with the selfie generation, where astrophotography is a process that is the equivalent of taking snap shots.
You know the alternate way, of course, which is what is called "pulse guiding." Some enterprising souls decided that they don't want to pay the few dozens of dollars to buy or build a converter that went from an RS-232 serial port (no USB back in them days :-) to the four contact closures. Instead, they use the RA and Dec slew in the Mount protocol itself.
Is it an advancement, yeah -- you no longer need the ST-4 cable if you are already computer controlling your mount, so it is very convenient. Is it better than ST-4? Questionable, especially for mounts that use 9600 baud -- latency needs to be calibrated out, and then you assume the latency is consistent, which is unlikely in today's programs that uses multiple threads -- especially if autoguiding is not given high thread priority.
ST-4 guiding is simply a way to send guide instructions to the mount directly through the piggy backed ST-4 circuitry that is present in many of today's guide cameras. Pulse guiding tries to emulate it by using the slew commands in mount protocols.
Some mounts actually do have specialized guide commands, where the command format is a direction plus a duration in milliseconds, so you don't have to sloppily time it in software with a start-slew-stop-slew sequence of commands. That is superior to using ST-4. But ASIAIR does not use those better guide commands even when they are available.
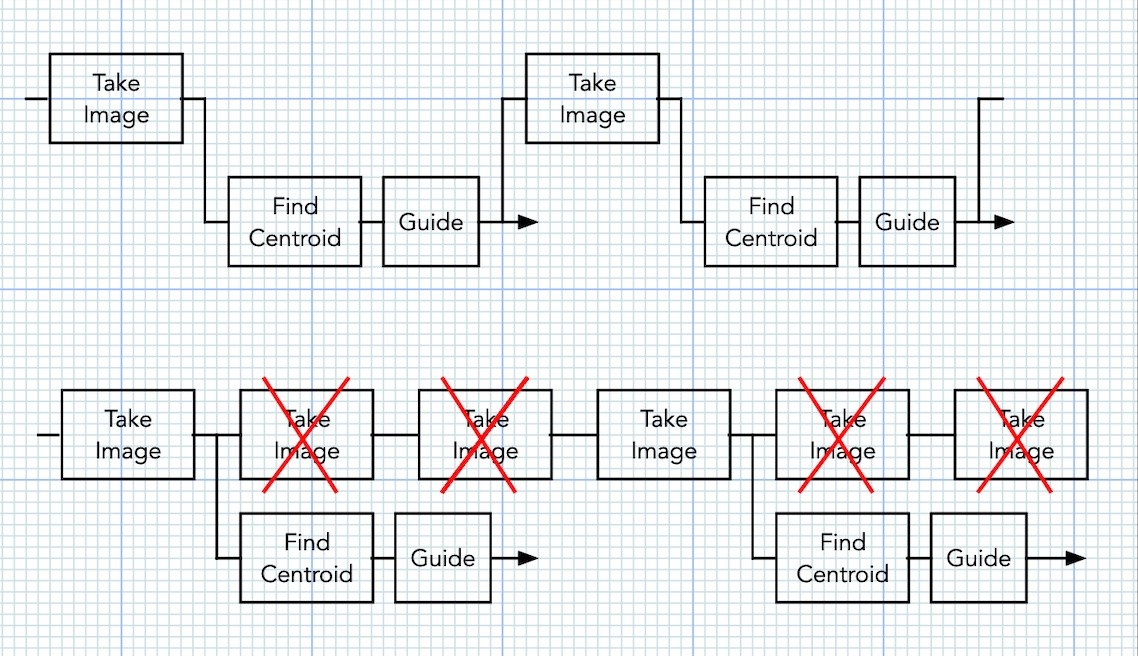
If the ASIAIR autoguiding bug is caused by their using the synchronous video captures that I described a couple of posts before, but did not properly discard unusable frames for example, then ST-4 guiding will not improve anything.
However, knowing ST-4 guiding performance could help understand where the bug resides.
I know ZWO says they did not change anything, and thus "no bugs." When you are in denial, you obviously will not be looking for the bugs. I know it is not our job to look for the bugs for them, and I know a number of people who have moved on to other platforms instead of fighting the autoguiding bug in ASIAIR, which supposedly does not exist!
As customers, I think we really have only three choices 1) accept and keep using the poorer autoguiding performance, 2) pinpoint the source of the bug for them (as I recently did with the Sync-and-GOTO bug, which also was left unfixed for a long time, perhaps because they were not even looking for the bug), or 3) move on to some other platform.
You can of course take a hybrid path, even if you prefer the convenience of a Raspberry Pi -- use ASIAIR to polar align (instead of using SharpCap to polar align on a real computer) and then switch to INDIGO Sky to do serious astrophotoraphy. The cost of an extra Raspberry Pi 4 is in the noise. And if you don't want to be tied down by a Raspberry Pi, the sky is the limit. But even this solution won't work if ASIAIR is not slewing your mount by 60 degrees during polar alignment!
Just use ASIAIR as an expensive PoleMaster substitute. If you can see the pole, you can even mount a dedicated polar alignment camera permanently to your mount like you do with the PoleMaster's camera.
Chen