Kevin_A Is it [worth] going to the 135E instead?
It all depends.
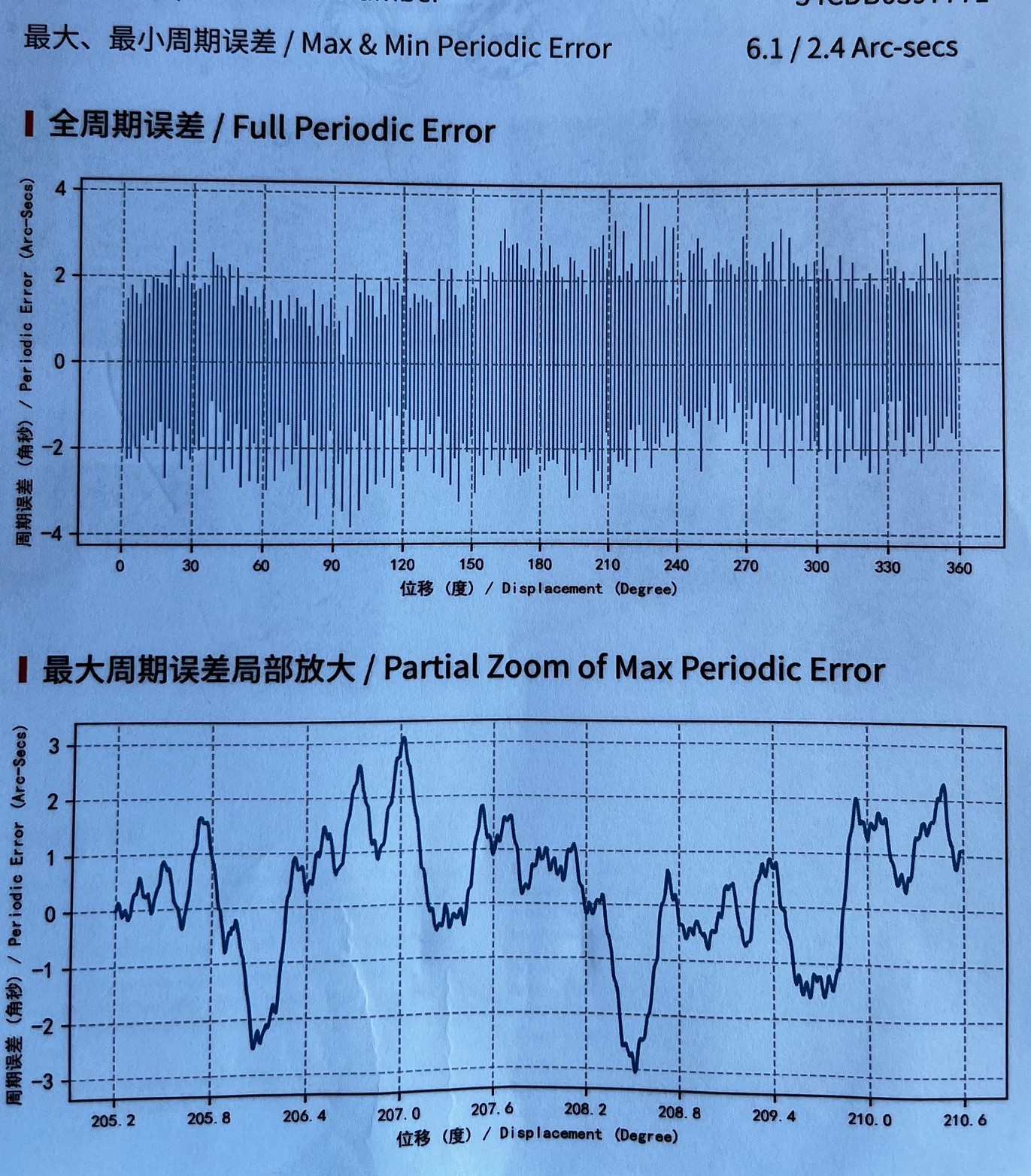
The Renishaw encoder in the 135E is only good to 2.5". So, if your plate scales need better than that (or you have nights where the "seeing" is better than about 2"), then the encoder will do you no good.
Think of it this way: gears are not precise enough for an arcsecond type precision. There are two ways to solve this -- one is to use the reference from a very precise encoder, and the other is to use the star themselves as even more precise reference points. Autoguiding is pretty much just using the stars as a very precise encoder (as long as the mount does not have glitches and respond properly to feedback pulses). In both cases, you establish a feedback loop to get the motors to point correctly again -- this is also why I prefer mounts that use servo motors instead of the (much) cheaper stepper motors that Chinese mounts (not just ZWO) use.
If you need better than 2.5" tracking, then you still need to autoguide anyway, and an encoder is wasted.
The reason I went from my initial two RST-135 to an RST-135E is that for a lot of my usage does not require high precision tracking (short focal length, planetary, solar [with FOA-60Q and a pair of Lunt filters [really heavy when double stacked!]).
I was so happy with the 135E (the peak error is 2.5", so the RMS error is more like 1.8") that I bought a second one, so that is how I eneded up with my current four RainbowAstro mounts.
My largest DSO scope only has 450mm focal length, so I can pretty much live with just the encoder alone. For planetary, you simply need to make sure the planet does not move out of the ROI. Ditto Solar.
So, for me at least, the 135E is definitely worth the upgrade from the 135 (you only live once, especially with the weather) -- wouldn't you pay an extra $200 to get rid of clouds just for one night? Fighting autoguiding error is just penny wise, pound foolish.
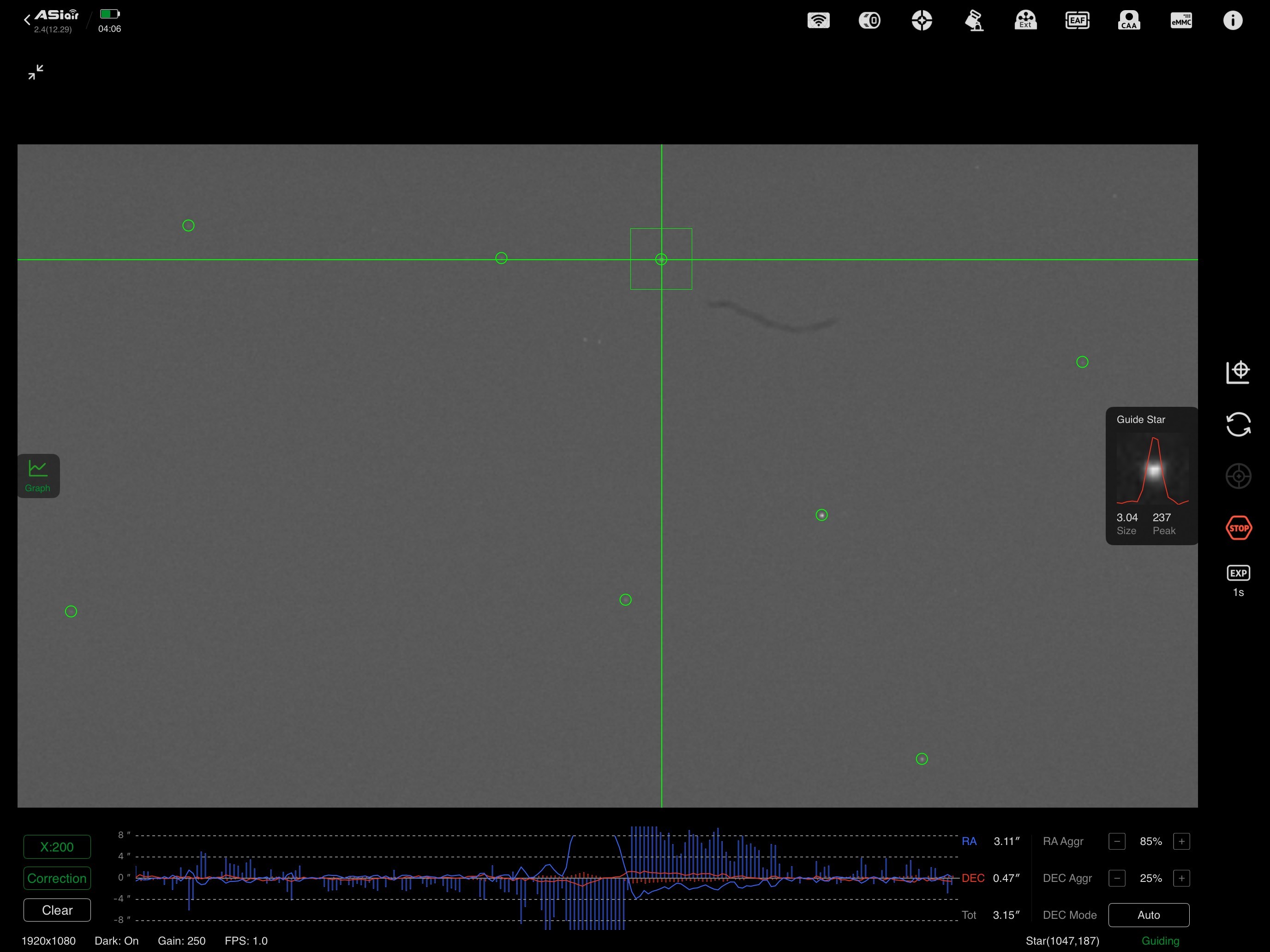
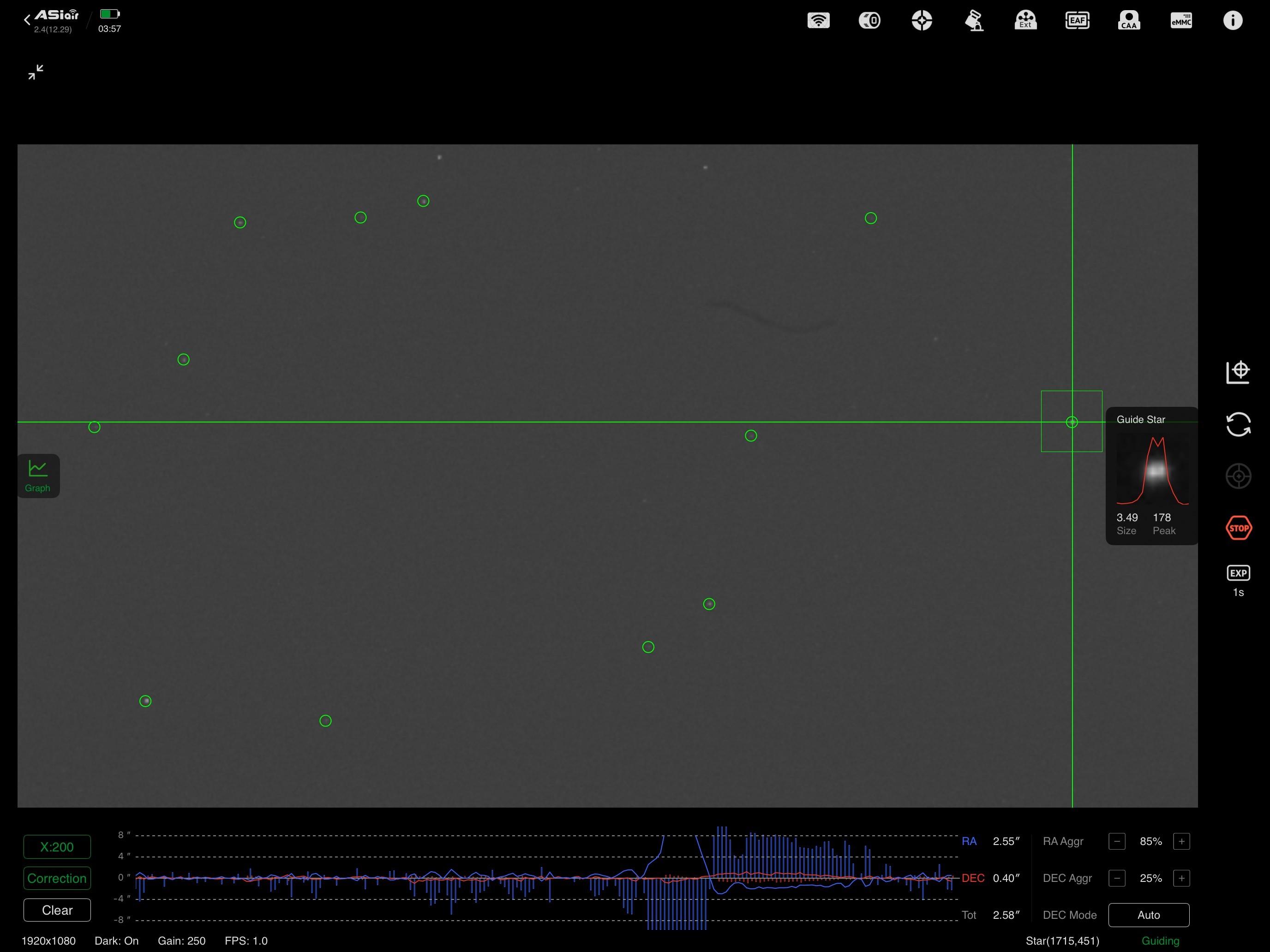
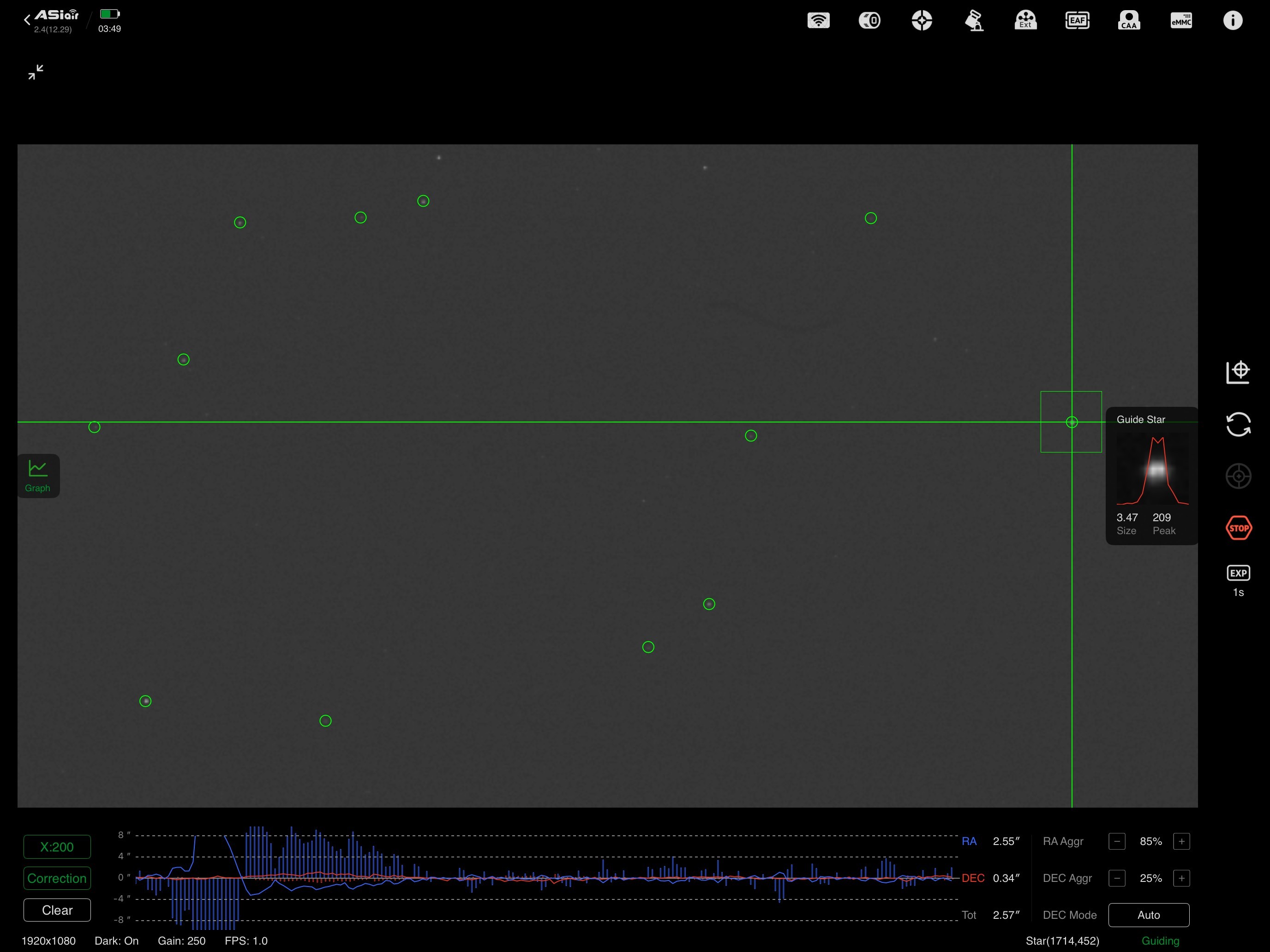
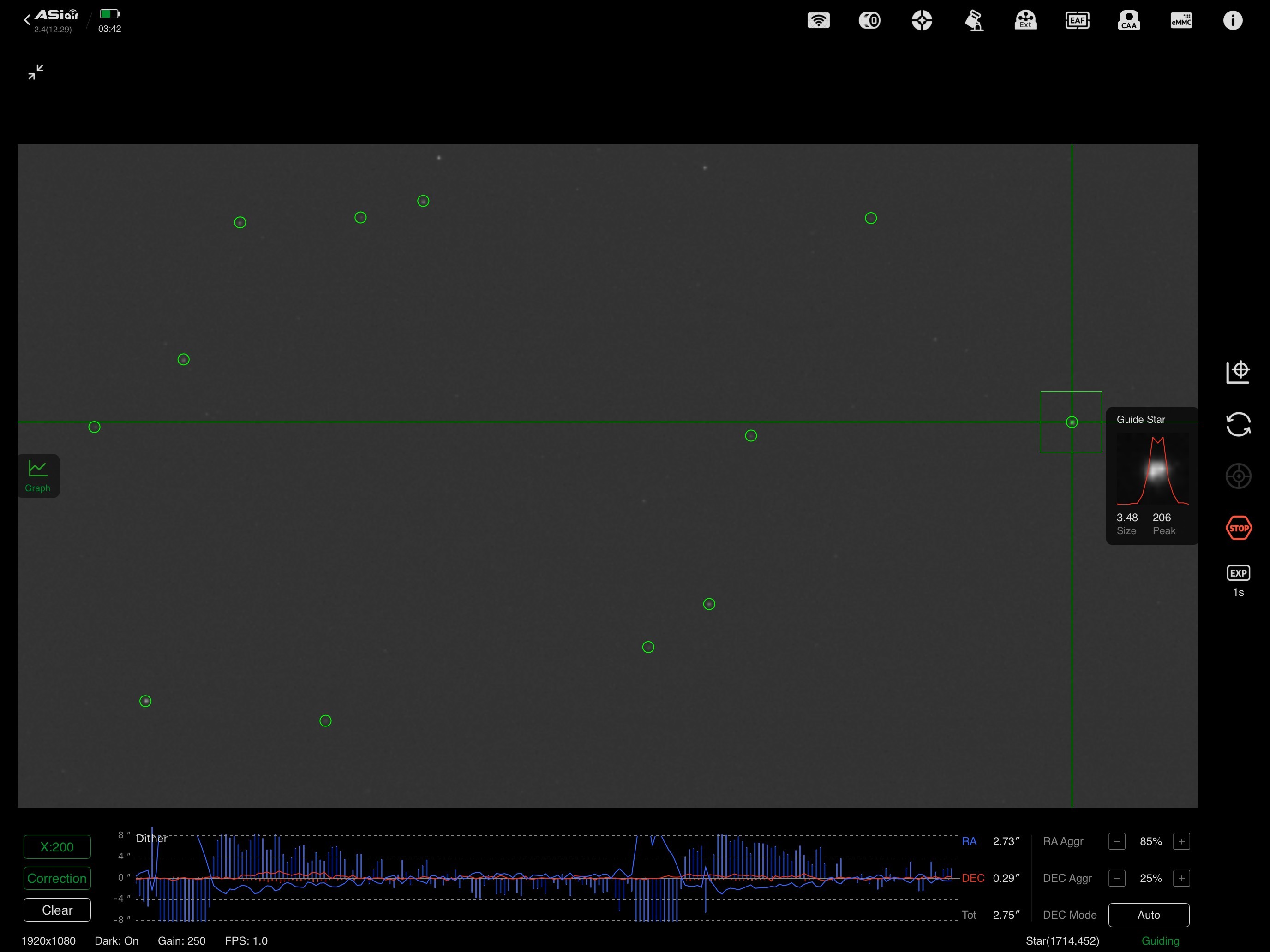
As to autoguiding, using 2 FPS guide camera,using the parameters that I had discussed here before (max step of less than 100, aggressiveness of less than 25%, overexpose by 10 dB over 12 stars), and a decent guide scope (either the 55mm BORG flourite, or the Vixen 55mm flourite), I can get a stable 0.25-0.35" total RMS tracking error (assuming calm winds) from the non-E. But you need to add the weight of a good guide scope, etc. Just like I was tired of counterweights and balancing, I also got tired of autoguiding.
Cheap mount + cheap guide scope is asking for trouble. If you cannot get a flat field, avoid using multi-star guiding.
On top of that, too many people try to autoguide away errors that are not caused by the mount (like wind), and end up with wild long term errors -- I simply don't understand why people have so much progblem autoguiding -- such people should just get a mount with an encoder. Autoguiding, like encoders, are to reduce mount errors, not wind, not field rotation. Stop tweaking the parameters to get short term error down (for the next 30 seconds). Compute what is needed, and use that setting for long term guiding.
ASIAIR also has a multi-star centroid problem, so you need to avoid using ASIAIR unless you restart autoguiding once every 30 minutes or so.
Chen