Aggressiveness value is basically the classical "loop gain." Apply too little and there is a larger residual error (e.g., the RA corrections not keeping up), apply too much, and the loop starts being unstable (e.g., the RA corrections, once started, can end up making large oscillations).
See https://en.wikipedia.org/wiki/Loop_gain among many other places.
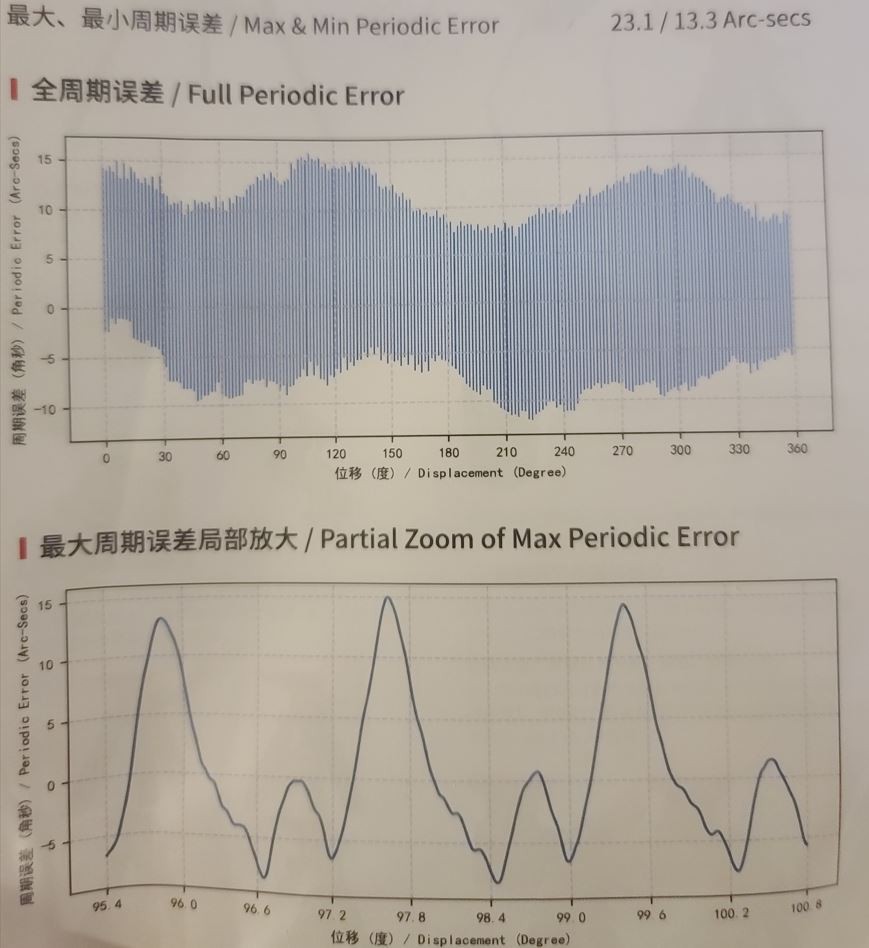
Mine looks pretty tame, comparatively
Unfortunately, yours also start off having (1) a peak-to-peak Periodic curve that is twice that of Kevin's, and (2) your mount has a huge second order harmonic (see the double peaks in the second figure? The second harmonic is so large that it flipped the direction of half of the peaks!). That basically make the 430 second period appear to be perhaps (eyeballing) 2/3 of what it should be.
Just those two factors put together could make your mount's worse case slope twice as large as Kevin's.
Consider this too: in Kevin's case, the large slopes appear four times per 430 seconds (two positive, and two negative slopes). Because of your mount's multiple humps, you are seeing eight places where the slope is large. So you could be seeing large RA guide errors very often, like every 50 or 60 seconds. Depending on how long they last, they may not register in the main camera's image, but it means that you are bound to have at least one large excursion for every subframe that you take that is more than 60 seconds long.
yet I'm having the hardest time guiding
Seeing your mount's PE curves, I am not too surprised that you have problems. Try starting with a 0.5 second exposure rate since I think your mount might need it (don't use anything longer than 1 second), find a camera that can give 2 FPS guiding (that is harder to do in ASIAIR v2.0 and earlier, but should be easy to achieve with a laptop and PHD2; ASIAIR v2.1 Beta has improved the guide FPS).
Start with low aggressiveness and a max pulse of less than half of the exposure (i.e., start with perhaps 200 ms max pulse or so -- only increase that value if you find that the guiding cannot keep up with the mount PE even with increased aggressiveness; try increasing aggressiveness first before increasing the max pulse). Remember that RA and declination have different gears, you will need different parameters with them.
To use short exposures, you will need to turn on multistar guiding, or "seeing" will eat you alive. If all guide stars have about the same SNR, using 2 stars is equivalent to doing 2 second guide exposures instead of 1 second. 4 stars is equivalent to 4 second exposure instead of 1 second (etc). You guys who have taken Probability Theory will recognize this a "Ergordicity" (in simple terms, ensemble averages is the same as time averages). In practice, not all stars have the same SNR, so 2 star guiding many only be 1.5x better than 1 star guiding, etc, and with further diminishing returns as you add even more stars.
As to MinMove, it will not help if the errors are not unidirectional (i.e., for the declination if you are perfectly polar aligned, and no declination drift, and there is a large backlash).
Backlash is not a problem with RA if you you keep (guide rate x guide pulse width) below the sidereal rate. This is because the mount is already tracking at 1x sidereal rate, and a correct pulse that is 0.5x sidereal rate) in the opposite direction (that is not too long) is simply a process of slowing down the motor for the duration of the pulse. For this reason, never ever make the max pulse duration of RA ever, ever close to 2 seconds when the guide rate is 0.5x sidereal. Or 3 seconds if the guide rate is 0.33x sidereal, etc. Once you know this, it should be obvious, but it is seldom explained, and most people figure it out themselves. If you remember, I was very vehement when I saw stuff like 2000ms being recommended as a max pulse rate for the RA direction.
Good luck.
Chen