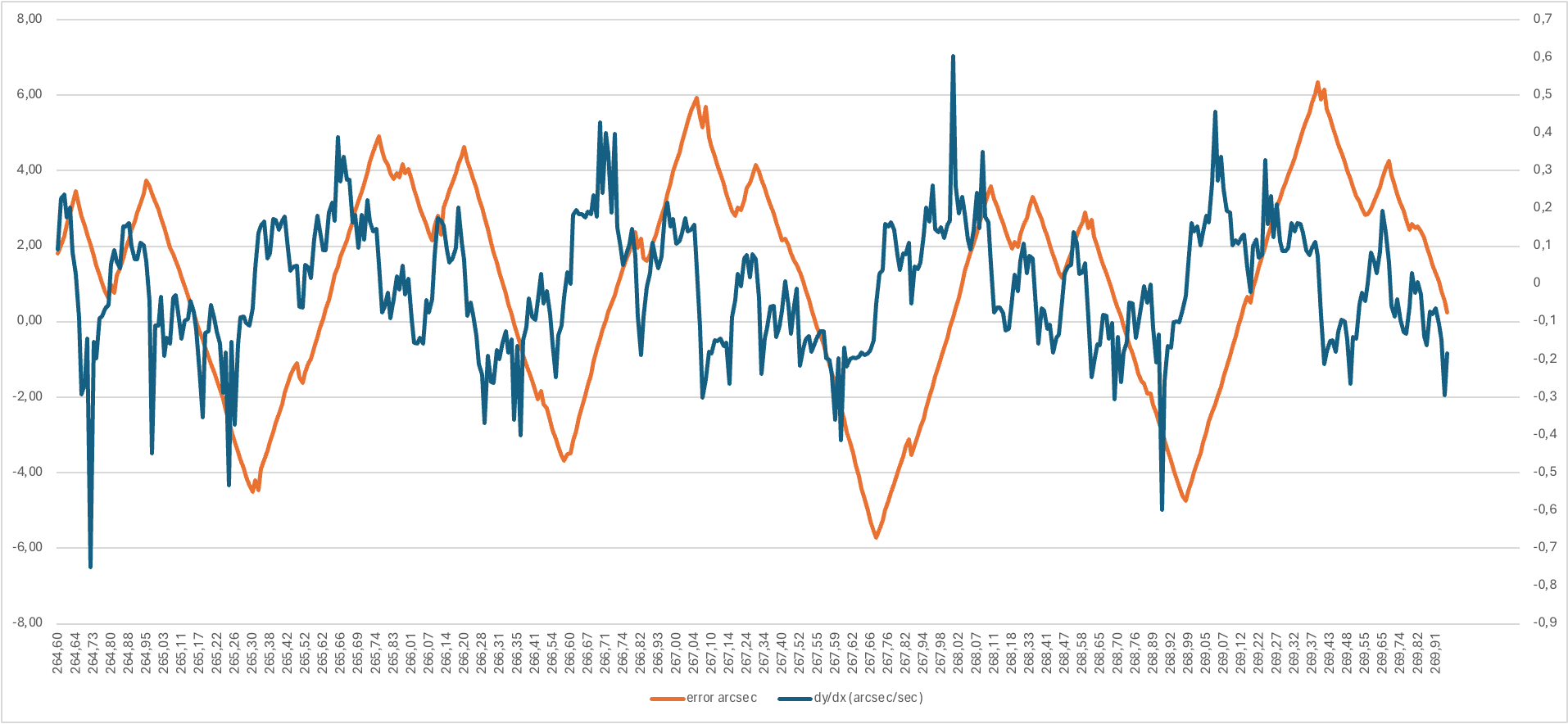
ShinyredAM5 I reckon mine needs around 0.2arc seconds / per second correction - am I on the right track?
Yes.
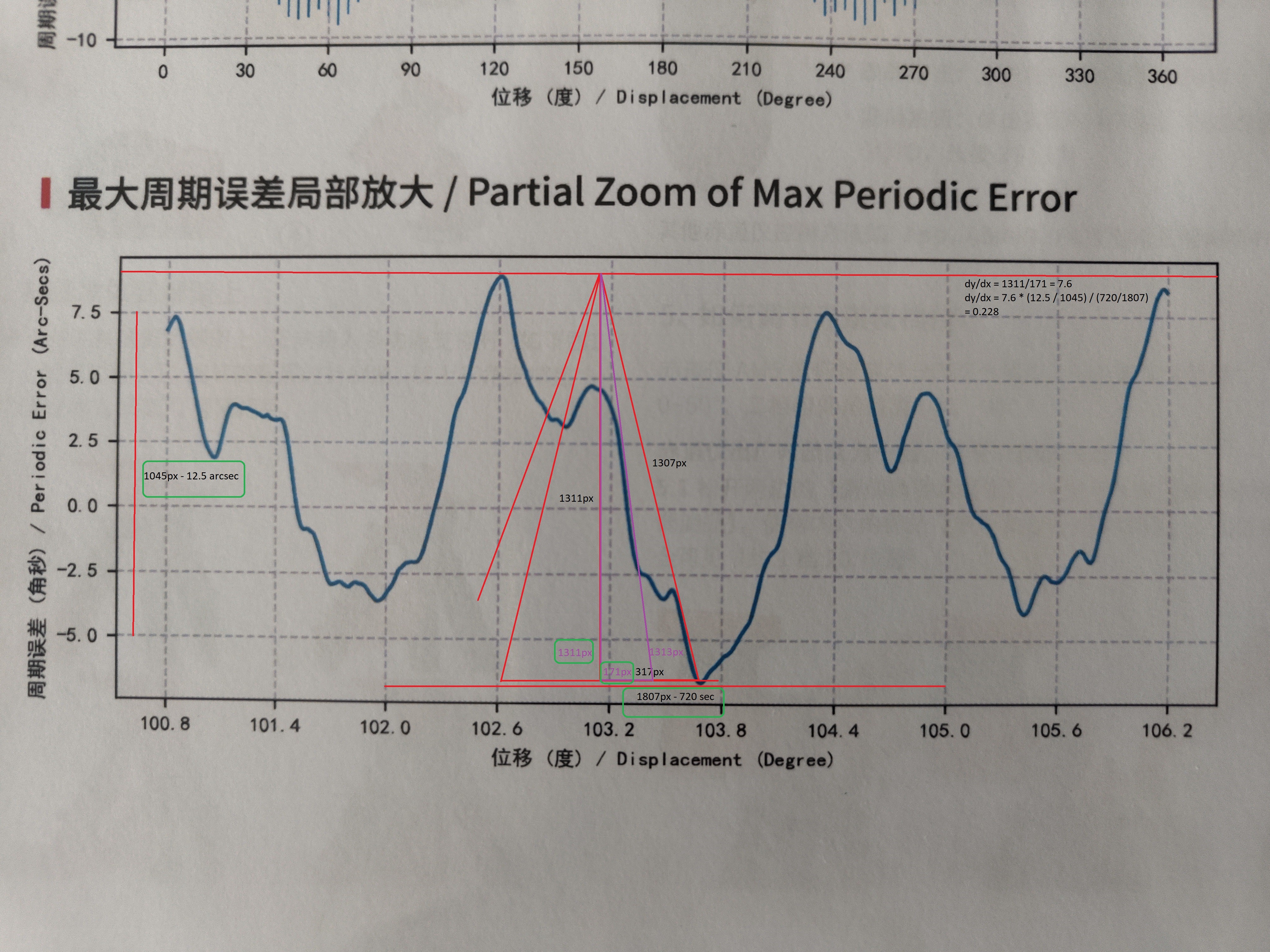
I placed two measurable lines on the graph that you'd posted.
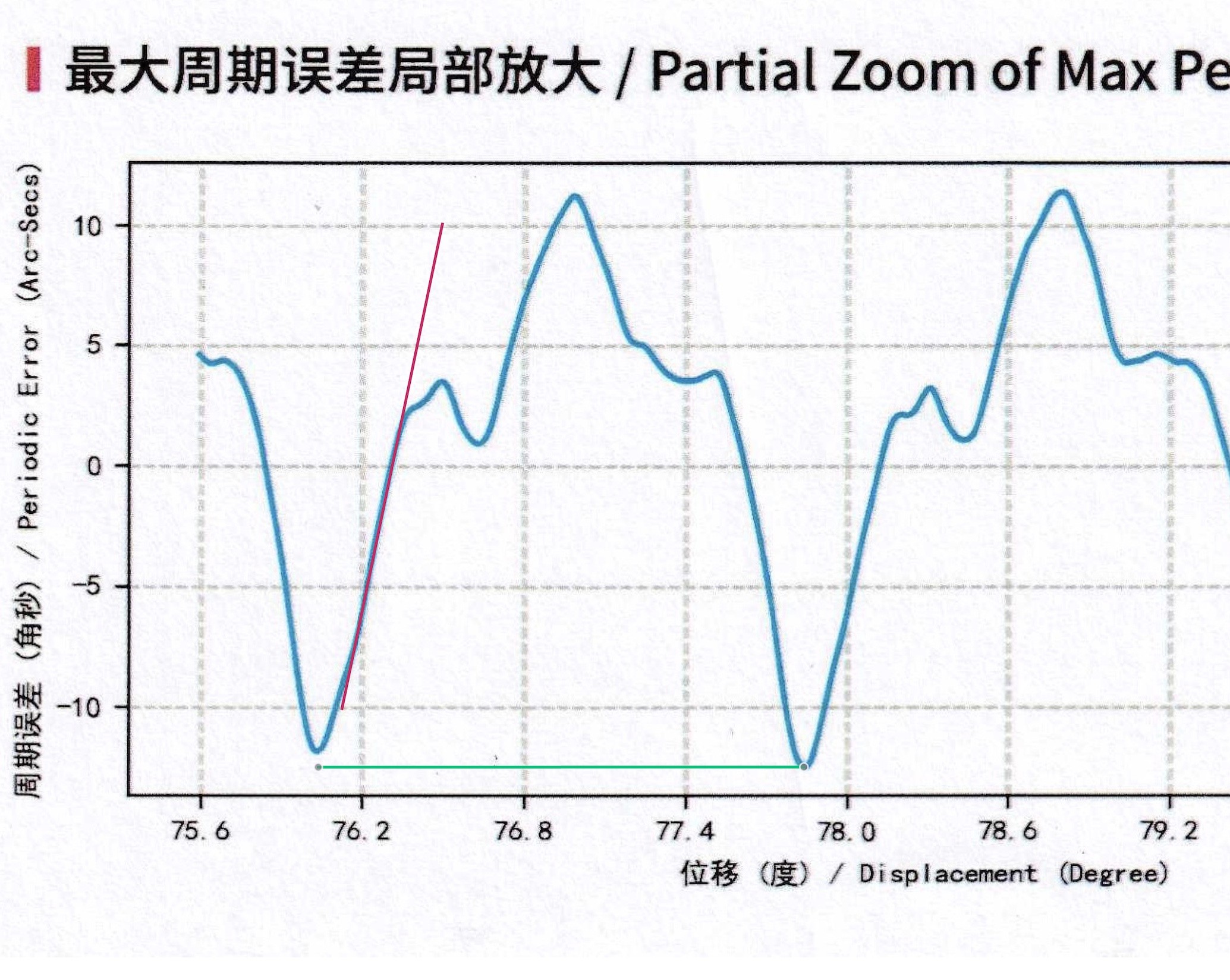
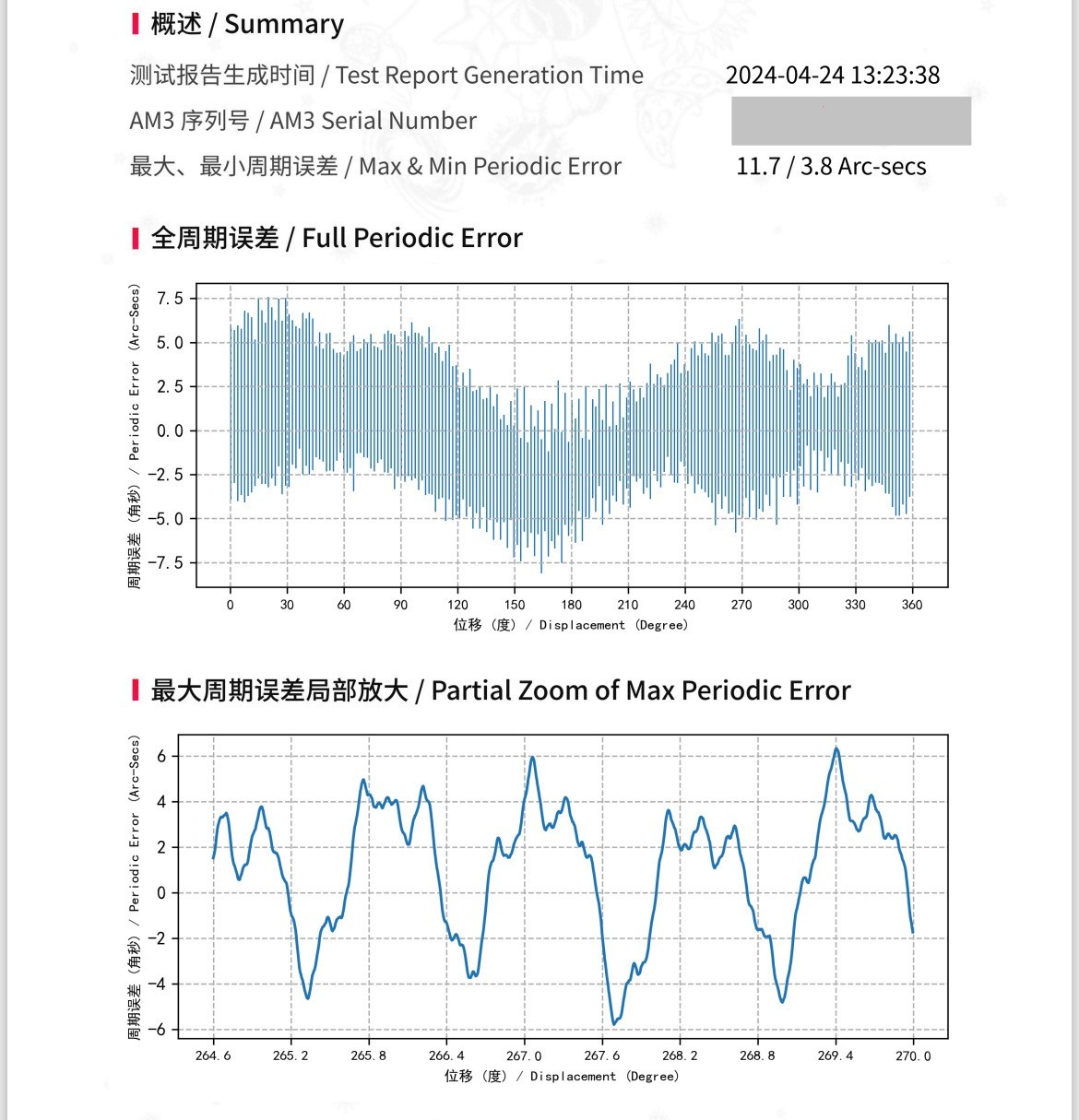
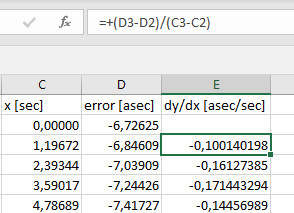
The green one is used to determine how many screen units corresponds to 430 seconds. This is the sceen parameters:
It shows that 430 seconds of the abscissa corresponds to about 12.22-5.13 screen units. Or about 60.6 seconds per screen unit.
The red line is an eyeball of the worse case slope (and thus worse case p-p guiding). I had placed it so that the bottom is at -10 arcsec and the maximum is at +10 arcsec.
On the screen, the horizontal change is 1.47 screen units. Using the scale from the green line, the horizontal change is therefore about 89 seconds. I.e., the slope is 20 arcsec/89 secs. Or about 0.22 arcsec/sec.
If you are guiding using 1 second exposures, the RA axis will not do better than 0.22 arcsec-peak-to-peak (that sawtooth) in the high slope regions of the RA rotation.
Assuming that your declination axis is under control, you might be able to eek out a slightly better result than you were getting before (0.7" to 1.3" RMS error for both axes) by limiting the RA pulse to 0.22/7.5 of a second, if you are using 0.5x sidereal guide rate. I.e., you should not need more than 30 ms of max RA pulse (but you can give it 100 ms or so to account for mechanical flexure and King tracking rate, if your mount does not support KIng rate). That should be sufficient to correct for the worst case periodic error of the gears. You are seeing much higher RMS error that is likely coming from other sources -- like bad guide star centroid estimate, wind gusts, that has nothing to do with the gears.
Based on the above, you should be able to get away with 0.4 arcsec RMS (on just the RA axis), by using 1 second guide exposures. But if you have good enough guide scope, you can try 0.5 second exposures (you need more than 9 guide stars).
Just turn the PHD2 "aggressiveness" setting way down and not chase any disturbance that is not caused by the gears. And on top of that, limit the max RA travel per pulse also, to clamp down on any disturabce that is not caused by the gears.
Chen